
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 Под действием центробежной силы инерции ролики стремятся оторваться от внутренней обоймы, вследствие чего может нарушиться контакт ролика с внутренней обоймой. Чтобы этого не. произошло, необходимо прижимную пружину выбирать соответствующей жесткости. Следует отметить, что пружины малой жесткости могут не обеспечить контакт в начальный период заклинивания, и заклинивание будет происходить с запаздьшанием или вовсе не осуществится. Прижимная пружина большой жесткости приводит к повышенным потерям в период свободного хода. Условие контакта ролика с внутренней обоймой: или из уравнения (37) (h + R sin ц) Р - PR Sin + (R cos p - ls) Pt + +AR Sin 7 - Us Sin {Y рд)1 G 0. (38) Прижимное усилие, создаваемое пружиной и гарантирующее контакт ролика с обоймами в начале заклинивания, m/os in p,Q)-( cosPi-/os) бз]- . р --[Д sin у - las sin (у - Pi)] G , , ----h,+ R sin -- Если ролики прижимаются к обоймам под действием момента Мпр, то величина Мпр = m/os [R sin Р1СЙ3 - {R cosPi - /os ) з] - . -G[/?sinV-/osSin(Y-p,)], (40) где co3, 83 - угловые скорость и ускорение роликов в момент начала заклинивания. Максимальное значение нормального усилия iVjmax ь течение одного оборота будет иметь место при угле у который определится из нахождения экстремума, аналогично углу у: (41) На основании уравнения (39) определим угловую скорость роликов со, при которой все ролики оторвутся от внутренней обоймы: / (/i + ;?sinp,) P+mlos {Rcosfii - los) е + (й \/ +\Rsin r-hssm (Y -Pi)] G mRlos sin Pi (42) Здесь 8 - угловое ускорение роликов в момент их отрыва от внутренней обоймы. Уповая скорость роликов о) найдется из дифференциального уравнения движения системы роликов в. период свободного хода (43) где момент инерции всей системы роликов; Mi - суммариьш момент сил трения F, М, - суммарный момент сил трения F,. Используя формулы (35) и (36), получим Ml - t fii = Мг ti №0 = Л zf,R (fliP + &iP + CiPi) + hRG Ъ di ; (44) ; (45) где z - число роликов; h коэффициент трения на поверхности соприкосновения роликов с наружной обоимощ Л = /? (Sin Ро +/2 cos Ро) - fao - а R (sin Рз -f /2 cos Рз) - h (cos Ро -/з sin Ро) - - /2Г0 cos fx; Й1 = Р (sin Pa -f /2 cos P2) -/2/-0 cos pi; Ci = (cos P2 - /2 sin Pa) - Us (cos Po - /2 sin Po) - - afoSinPi; di = R (sm 72 - /2 90s 72) - los (sin Ti cos Po - -/2 sin 7i sin Po)-f-/20 cos 7; = h + R sin [i; = R sin p; = R cos Pi - Us, 2 = sin 7 - los sin Tl- Так как ролики расположены в кольцевом пространстве между обоймами на равных расстояниях один относительно другого, то можно принять = О и f da = 0. Принимая во внимание последние соотношения и выражая силы инерции Р и Р в формулах (44) и (45) через их значения Pn = >nlos4>; Pt==>nU-i * найдем моменты сил трения M, = AhzR [ml (v> + Ci4)+fliP (46) (47) . мГ3 Ml и Мз из формул (46) и (47) в выражение (43), получим \ / к dt Jc - Azmlos {hRci - f.,roc2) = 0. Обозначим постоянные Az {fiRbi - hri) mlos . 1 Jc - AzmlosihRci - fzroc) Az {hRay-Ш Jc -AztnUsifrRcx-tirfft) после чего запишем Разделив переменные, проинтегрируем это уравнение: t (Л arctg(О-arctg / о (48) Здесь ©о - угловая скорость, соответствующая началу свободного хода при выполнении неравенства ©i :> © > ю. Решив уравнение (48) относительно ©, получим © = = tg (arctg 0)0 +/,-Р (49) Мгновенная мощность /V, затрачиваемая на трение, определится на основании формул (46) и (47): = Az \f,R [tnlos (&! + с,г) аР] (а>, - ©) + + /20 [mlos (се - Ьоу ) 4- /I ( - ©2)) (50) При ©1 > © < ©2 дифференциальное уравнение движения роликов примет вид Л = м1 + А?2. Интегрируя это уравнение, произведя выкладки, аналогичные предыдущему случаю, определим угловую скорость роликов: © -- где й., = А = а[ = ь; = cl = /-5g-1g (arctg Yj + VgKPt (51) Jc - z Iqs {fi Ri - 22) Az (fij?oi+f2W . - лгяг/os (f, Rc\ -22) - \ 1 . R (Sin po -facospo) +/2г-0 . P [Sin (Po + }a) - /2 COS (Po + i)] + /г (cos po + fa sin Po + /a-Q COS (a); (Sin p2 -/2 COS Pa) +COS pi; /os (cos Po -b /2 Sin Po) - R (cos P2 + /2 sin P2) - f2ro sin Pi. Здесь ©n - начальная угловая скорость роликов в период свободного хода при ©i > © < ©3. Мощность, затрачиваемая на трение, N,=Az [fiR[d,P+ tnlos {bW + ci8)](©, - ©) + + hr, [a-iP - tnlos (b.© + C28) 1 (©2 - ©) 1. (52) Анализ свободного хода при ©i < © > ©2 показывает, что этому случаю присущи те же зависимости для свободного хода, которые имеют место при ©i :> © > ©2, с той лишь разницей, что тангенциальная сила инерции Р имеет только положительное значение, а формула (49) представляется в виде = tg (arctg Y 0 + VqsksPt) (53) Azmlps (liRbi - frob) . Jc - Azml s (lyRc + firc) Az (fiRai+f2roa2) Jc-Azmlos if,Rci +(22) Здесь ©0 - начальная угловая скорбеть роликов в период свободного хода при ©i<©>©2. Механиз!мы с индивидуальными прижимами. На рис. 5 показана схема сил, действующи на эксцентриковый ролик с индивидуальным прижимом в период свободного хода. Согласно этой схеме запишем уравнения равновесия в виде суммы проекций на направление, перпендикулярное к ОВ, и суммы моментов относительно центра механизма О: - yVaSinpo-ZaAaCOSpo + GsinY + Psinp, + + (?cos(a-P sinp + Pcosp = 0; , - f.Nro + G/os sin (7 - - Phi 4- Qh + pi = 0. Совместное решение этих уравнений позволяет определить у Р {hi cos n + h, sin г) - P h, sin p, + Pt {h, cos p, - l s cos ц) / fta (sin Po + /2 cos Po) + f.,ro COS li г , G [fta sin 7 -/os cos sin (7 - Pi)] Ih (sinpo-f/2cosp ) + /2rocosn (54) В течение оборота давление изменяется с изменением угла 7 Чтобы определить величину угла 7, соответствующего минимальному значению нормального уси-ия Л/атш. найдем = G [{hcosy- - los<OS (а COS (7 - Pi) = О, откуда 7=я- -- gl/oscosinp, -tgPx)- (55) Из условия контакта роликов 2 mill > о с использованием соотношения (54) найдем величину прижимного усилия, обеспечивающего контакт роликов с обеими обоймами: Pnhi sin Pi - Pt Ф2 cos Pi - /os COS ц) - P -Gfe Sin 7-<oscosPi Sin (7-Pi)] fti COS n + Й2 sin n (5o) Отрыв всех роликов от внутренней обоймы и, следовательно, движение механизма в бесконтактном режиме будет наблюдаться при Л2 max < 0. ,Угол 7 = 7 , соответствующий максимальному значению усилия Л/гшах. определится аналогично, как и угол 7: = g(/oscos:sinpr-gpO- (7) Определив величину Лгтах по уравнению (54) и приравняв ее к нулю, найдем наименьшую угловую скорость наружной 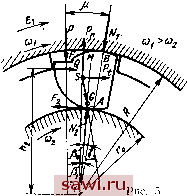 обоймы при бесконтактном движении роликов с внутренней обоймой: cd? = Р {hi COS ц -- /i2 sin ц) + Pt (/i2 cos Pj - los cos \i) + + G [fta sin 7 - <oS cos yi sin (7 - Pj)] mlosfh sin Pi (58) ТЕОРИЯ ЗАКЛИНИВАНИЯ РОЛИКОВЫХ МСХ Усилия, действующие на элементы механизма в период заклинивания и заклиненного состояния. Под заклиниванием роликового МСХ понимают процесс защемления ролика между рабочими поверхностями обойм в момент такого относительного перемещения их, которое вызывает закатывание ролика в более узкую часть про- 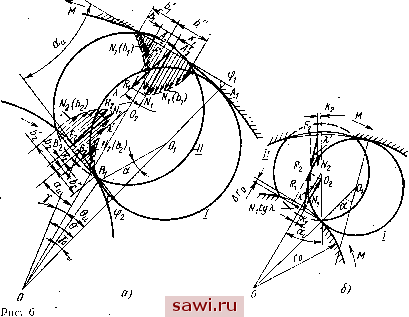 странства между обоймами. Этот период сопровождается приложением, нагрузки к элементам механизма и их деформацией: потерей энергии на трение качения ролика по рабочим поверхностям обойм, потерей энергии на разрыв масляной пленки, гистерезисом и накапливанием потенциальной энергии деформации. Процессу заклинивания предшествует момент, соответствующий концу свободного хода, когда угловые скорости обоймы Oi и звездочки ©2 становятся равными, т. е. хо = ©г- Заклинивание начинается при ©2 > ©i и заканчивается равновесным заклиненным состоянием. Если под действием всех сш, приложенных к ролику, в начальный момент процесса заклинивания ролик перемещается Установим охранное оборудование. Тел. . Звоните! |