
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 Здесь 2(1 rn) ..... 2(l-m) . 2 (I -m - 2trfi). , 2пЕг1рГо {R - r) sin фр . , гяг/рГо (о + r) sin фо . i- fzrj 2---:г7Р- 2(1 OT -2m) пЕг1рГо Так как различие в углах ф и фц относительно невелико, то при выводе формул (83) и (84) под знак логарифма в выражение (81) вошла величина интенсивности нагрузки, определенная по формуле 9 = г/р.о 1дф (85) Относительное перемещение роликов в процессе заклинивания. В процессе заклинивания по мере деформации основных элементов механизма ролик перекатывается по рабочим поверхностям обойм, устремляясь в более узкую часть пространства между ними. Пусть при действии на механизм момента М (рис. 8, а, б) ролик из положения / переместится в положение аобойма повернется на угол относительно звездочки. Обозначим полярные координаты центра ролика Рц и бц. Поместимшолюс в центре механизма в точке О, а полярную ось направим по линии 00о-Сувеличением крутящего момента на величину dM ролик переместится в положение /, совершив элементарное движение, а обойма повернется относительно звездочки на угол d. При этом, очевидно, = ttdMi. (86) После интегрирования получим Рц = / 1. (87) Для определения угла 0ц рассмотрим положения и / (на рис. 8) ролика в процессе заклинивания. Из треугольников Оффч и ОВВ находим ....... . --=±/-р(вд) + 1; ± - Р (вд) cos аи г - 2 - d 2 создай -f d<xy, 186 d [р (вц)] + 1 dUi (88) (89) 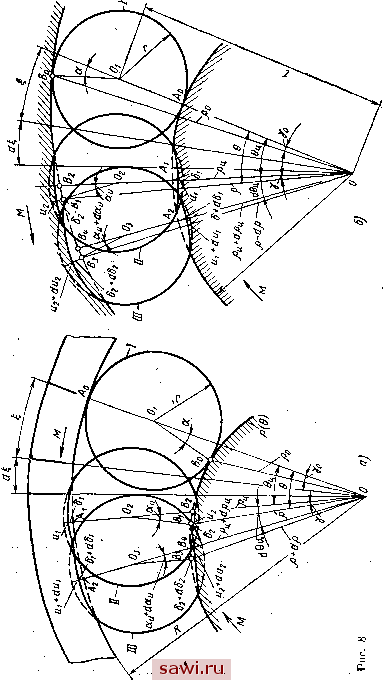 Если принять cos а cos (а + daj, то, вычитая почленно из уравнения (89) выражение (88), получим [р(9ц)] == (dMi + dMa). (90) Уравнение (90) получено в предположении, что участки направляющей кривой рабочей поверхности звездочки БВа и прямолинейны. Это предположение достаточно обосновано, если учесть, что а <: 10°, а кривизна направляющих кривых относительно невелика. 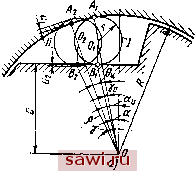 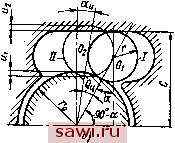 Рис. 9 Интегрируя уравнение (90), получим Р (0ц) = Ро ~ ( 1 + а)- (91) Уравнение (91) является исходным при определении угла 9. Используя это уравнение, определим зависимость между углом 0 и моментом М для наиболее распространенных на1Ч)авляющих кривых контактных поверхностей звездочки. Величина р(6ц) и рц для плоской контактной поверхности найдется из рассмотрения рис. 9 , а, б: с . с Р(вц)- COS (а ± бц) И, следовательно, с cos а Ро = cos та (92) вц =: arccos с ± ( 1 + Ua) cos а , где с - расстояние от центра звездочки до рабочей поверхности. Для цилиндрической контактной поверхности с направляющей кривой в виде логарифмической спирали р = ев* запишем р (ej = e(o-Vo+B) ctg 1= и e(e -v ) ctg г, или, подставляя в уравнение (91), получим Ui + Uj e, = tgi;ln (93) где \1р - постоянный угол между касательной и ради усом-вектором. Значение угла п г> г, i if sin а 9o==2.3tgiplg[3) Угол г sin а Yo = arcsm V{1 ± /-)2+2r(l +cosa) / или Yo = 90° a). Для цилиндрической контактной поверхности звездочки с направляющей кривой в виде спирали Архимеда с началом координат в точке О и полярной осью, направленной по OAq, получим р (8ц) = а {2м1 ± й) и ро = 2апп, где rt - число витков спирали Архимеда, равное О, 1, 2, 3, ... После подстановки значений р (0) и ро в.выражение (91) найдем (94) Для цилиндрической контактной поверхности звездочки в виде круглого цилиндра, очерченного радиусом Го = / - / из центра с эксцентриситетом е = 2/sin величина () (вц) определяется: р (0 ) = 21 Sin - Sin (-J ± 0д) + Y{l+rf-U sitf -f-cos ± 0ц). В силу малости угла 0ц принимаем cos 0ц Тогда гдеГо=/ + г; = 2/sin*--; fo = /sina. 1 и sin 0ц (95) Таким образом, относительное / движение центра ролика, в зависимости от нагрузки, в процессе заклинивания определяется в полярных координатах в параметрической форме уравнениями (87) и (92)-(95). Относительное перемещение обойм в процессе заклийивания. При заклинивании обоймы под действием нагрузки вследствие деформации как самих обойм, так и роликов поворачиваются в относительном движении на угол . Этот угол является одной из главных характеристик МСХ. Его большое прикладное значение состоит в том, что он опреде:яет падение углового перемещения и угловой скорости ведомого звена механизма; существенно влияет на величину минимального угла размаха ведущего звена, при котором механизм начинает функционировать; в значительной мере определяет потери в процессе заклинивания и усилия, действующие на звенья механизма. Он является главным фактором при определении дуги перекатывания ролика, по контактной поверхности звездочки в процессе заклинивания. Эта дуга не должна превышать длину профильной линии рабочей поверхности звездочки, иначе механизм не будетработать. Чтобы определить зависимость угла I относительно поворота обойм от момента М, действующего на механизм, рассмотрим схему перемещения роликов и обойм в процессе заклинивания (см. рис. 8). В период заклинивания по мере деформации основных элементов МСХ ролики перекатываются с проскальзыванием по рабочим поверхностям обоймы и звездочки, перемещаясь в сужающуюся часть клинового пространства между ними. Элементарное движение ролика из положения в положение / осуществляется подобно перекатыванию сателлита в фрикционной дифференциальной передаче при наличии проскальзывания ролика в местах контакта с обоймами и деформации как ролика, так и обойм. Приближенно без учета проскальзывания ролика величину dl можно определить так: dl==de+dQ, (96) где 6ц - угол поворота центра ролика; рр и Rp ~ средние радиусы рабочей поверхности звездочки и обоймы с учетом их деформации при перекатывании ролика из положения в положение /. Обозначив деформации обоймы и -звеадочки в местах контакта с роликом 6i и бз (см. рис. 8), определим Рср КР + 62) + (Р ± Ф + 83 ад = р i- 62 i?ep = [( ± /- ± 61) + (/ ± г ± 61 ± d8i)] = / ± г ± бд ± Тогда уравнение (96) можно записать в виде 2 d6i didQ + Р -1- 62 ± I ± г ± 81 ± Пренебрегая бесконечно малыми величинами второго порядка и величинами б и 63 как весьма малыми по сравнению с и г, после интегрирования последнего уравнения будем иметь 1 = 0ц. 190 / ± г Р0ц. (97) Это уравнение является исходным при определении угла для механизьТОв с различными контактными поверхностями. Плоская контактная поверхность. Для плоской контактной поверхности-Звездочки (см. рис. 9) (98) cos (а ± 7о ± бц) при этом считаем, что угол у = уо. затем по формуле (97) находим 1 = еи + 7Ь cos (а ± 7о ± бц) tg (а±7о ±-6)+- Подставляя 6ц из уравнения (92), получим 1±г ± arccos Intg arccos с cos а с cos а с ( 1 + 2) cos а - 2 с / а ± 7о с ± ( 1 + 2) cos а J I ± г lntg( я \ Цилиндрическая контактная поверхность с направляющеТйв виде лога(рифми-ческойспирали. Если на рис. 8 профилирующая кривая представляет логарифмическую спираль в полярных координатах с полюсом в центре механизма - точке О, то p=e(W)<=**. . Уравнение (97) можно записать так: =вц+- ±г Используя уравнение (93), получим i = tgln 1 + 2 - (9o-Yo)ctgt к ± J ±г (99) (100) Установим охранное оборудование. Тел. . Звоните! |