
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 при известных динамических параметрах привода и характеристиках двигателя и вариатора могут быть использованы при расчете и проектировании автоматических бесступенчатых приводов, способных обеспечить необходимый закон изменения угловой скорости исполнительных органов рабочих машин, обусловленный технологическим процессом. ОБЩИЕ ПОЛОЖЕНИЯ О СОСТАВЛЕНИИ ПРОГРАММ АВТОМАТИЧЕСКИХ ВАРИАТОРОВ Автоматическое регулирование вариаторами в системе привода рабочих машин осуществляется посредством автоматической управляющей системы (см. гл. 2), которая, воздействуя на ведущее звено регулирующего механизма вариатора, вызывает необходимое изменение его передаточного отношения. Под программой управления приводов с бесступенчатым регулированием угловой скорости ведомого звена с учетом характеристик вариатора и приводного двигателя будем понимать закон движения ведущего элемента регулирующего механизма вариатора, обеспечивающий изменение угловой скорости исполнительного органа (оптимальная угловая скорость) в соответствии с требованиями технологического процесса. Для принятой схемы привода (см. рис. 2) передаточное отношение настройки вариатора можно записать так: - Ai(i, М). (29) Так как регулирующие механизму у различных систем -вариаторов чаще всего различны и обладают разной чувствительностью регулирования, то при расчете и проектировании управляющих систем в каждом конкретном случае необходимо знать зависимость изменения передаточного отношения вариатора от координаты а перемещения ведущего звена регулирующего механизма, т. е. а = 6 (i) (см. гл. 4). Тогда программа управления приводом с бесступенчатым регулированием угловой скорости исполнительного органа в общем виде может быть записана так: а =6(0 = 6 (30) Здесь закон изменения оптимальной угловой скорости ф рабочего органа определяется параметрами технологического процесса (одним или несколькими). В зависимости от принятых допущений будет изменяться точность составления программы. Вопрос о точности программ требует специального исследования и накопления опыта эксплуатации автоматичес1их вариаторов. Видимо, на данном этапе его следует решать в каждом конкретном случае самостоятельно. Без учета и при линейной аппроксимации характеристики двигателя С использованием уравнений (25, 30) программу за- пишем так: а = I 2fiiii2(l-f 1хЛ1 )ф . (31) При ф1 = const величину i найдем из выражения (28), и, следовательно. а = е 1 2ф (1 + 1ХЛ1 ) а для привода с идеальным вариатором а = е \ hh4> I (32) (33) Итак, вопрос о составлении программы управления вариатором и разработке управляющих систем должен включать три главных этапа: определение закона изменения передаточного отношения вариатора, обусловленного технологическими требованиями, и учета-характеристик вариатора и двигателя а также переменности массы ведомой части привода; . - определение изменения координаты положения а ведущего звена регулирующегомеханизма в функции передаточного отношения вариатора; определение зависимости координаты а от параметров технологического процесса. Глава 10 ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ПЕРЕДАЧ ОПРЕДЕЛЕНИЕ НЕРАВН.ОМЕРНОСТИ ВРАЩЕНИЯ ВЕДОМОГО ВАЛА ЗУБЧАТО-РЫЧАЖНОГО ВАРИАТОРА. Опытное исследование неравномерности вращения ведомого вала импульсного вариатора проводили с помощью магнитно-электрического датчика, На рис. 1 показана схема экспериментальной установки. На ведомом валу вариатора / закреплен диск 2 с зубьями с постоянным шагом. При вращении диска зубья проходят вблизи полюсов постоянного магнита 6, в одной катушке которого, соединенной с вибратором осциллографа 8 индуктируется ток. Изменение этого тока фиксируется на пленке осциллографа в виде волнистой линии. Другая катушка магнита, соединенная с аккумулятором 7, предназначена для подмагничивания. Для нагружения передачи ра ведомом валу установлен тормоз 3. Настройку тормоза на определенное усилие производили с помощью динамометра 4. На необходимую частоту вращения передачу настраивали посредством тахометра 5 (при п = 100-f-lOOO об/мин) и с помощью секундомера (при п = 50-100 об/мин). Более точно частоту вращения определяли по осциллограмме. Исследование неравномерности движения ведущего вала импульсной передачи производили при частотах вращения п = 50, 100, 250, 500, 750 и 1000 об/мин. Нагрузку при первых четырех частотах вращения варьировали от О до 1,5 кгс-м через каждый 0,5 кгс-м, а при последних двух от О до 0,5 кгс-м через каждые 0,25 кгс-м. Так как на диске 2 один зуб был срезан, то имелась возможность выбрать на осциллограмме участок, соответствующий одному полному обороту диска. Зная частоту вращения диска, определили число циклов, приходящееся на один оборот: где k = 5 -число механизмов свободного хода; п = 1420 об/мин - частота вращения вала электродвигателя; п - частота вращения диска или ведомого вала. Число колебаний вибратора, приходящееся на один цикл. и, следовательно. где 2д - число зубьев диска. Из этой формулы следует, что с уменьшением частоты вращения ведомого вала уменьшается число колебаний вибратора, приходящееся на один цикл движения передачи. Чтобы < / 2 , 5. . J увеличить точность измере- 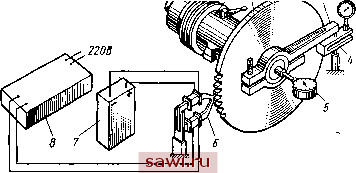 Рис. 1 ния при малых частотах вращения ведомого вала (50 и 100 об/мин), пришлось увеличить число зубьев диска 2д. Для этого диск был заменен зубчатым сектором с числом зубьев 2д = 1200. Подсчитав за определенный промежуток времени по осциллограмме число колебаний вибратора и за этот же промежуток времени число колебаний отметчика По, определим угловую скорость ведомого вала: со = где fo - число циклов колебаний отметчика в секунду. В результате обработки осциллограмм на рис. 2 построены кривые изменения угловой скорости а> ведомого вала в зависимости от угла поворота ф кривошипа при номинальной нагрузке на тормозе. Для сравнения на этих же графиках штриховыми линиями показаны кривые изменения ш, полученные в результате теоретического исследования передачи. По экспериментальным кривым (см. рис. 2) построены графики (рис. 3) изменения коэффициента неравномерности боп, полученного опытным путем, в функции частоты вращения ведомого вала. Сравнивая кривую= оп ( ) с кривой изменения коэффициента. неравномерности б = б {п}, полученного теорети- п=970о6/шн n=71ZoB/muh  n=U60oS/muh п=гЗюб/мин 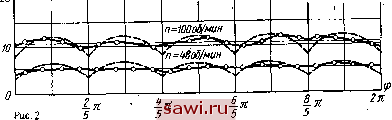 0,20 0.15 0,10 0,05
0 Ю0 200 300 WO 500 600 700 SOOn.oS/muh g 5 50 75 100 125 150 175 200MjaC-CM fuc.3 Puc.i чески (см. рис. 3), видим, что несколько меньше б в,диапазоне малых и средних частот вращения ведомого вала (п = 50чг -+-600 об/мин) и превышает б в диапазоне 600-1000 об/мин. Такое отклонение опытного значения коэффициента неравномерности от теоретического объясняется прежде всего тем, что в диапазоне малых и средних угловых скоростей -ой относительный угол поворота обойм МСХ больше влияет на уменьшение б, чем при больших значениях ш. Воздействие динамических усилий на ролики МСХ в период его свободного движения при больших значениях ш вызывает колебания роликов [60], что приводит к запаздыванию процесса заклинивания и менее стабильной работе механизма. Чтобы выявить вли-яние нагрузки на величину боп, была проведена серия опытов, по результатам которых построены кривые (рис. 4) изменения боп в зависимости от крутящего момента на ведомом валу передачи для различных значений п. Как следует из этих кривых, боп увеличивается с увеличением нагрузки. Это соответствует теоретическим выводам и, кроме того, может быть также объяснено увеличением неравномерности проскальзывания в МСХ. Влияние нагрузки больше сказывается на увеличении боп в области малых частот вращения. Последнее обстоятельство, по всей вероятности, может быть объяснено большим влиянием податливости МСХ на неравномерность -вращения ведомого вала передачи в этой области частот вращения. ОПРЕДЕЛЕНИЕ СРЕДНЕГО МАКСИМАЛЬНО ДОПУСГИНОГО ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ ПРОСТЕЙШЕЙ ПЕРЕДАЧИ Как было установлено выше, передаточное отношение i вариатора теоретически может неограниченно увеличиваться с уменьшением длины г кривошипа. В действительности максимальная величина передаточного отношения ограниченна, в области больших значений i наблюдается неустойчивое движение ведомого вала с пропусками передачи импульсов. Это объясняется прежде всего ограниченными возможностями передавать движение посредством МСХ. Неустойчивость движения ведомого звена МСХ с остановками при малых величинах угла размаха t? ведущего звена объясняется сущностью механики заклинивания МСХ. Прежде чем наступит момент передачи движения в МСХ к обойме от звездочки, необходимо, чтобы последняя повернулась на угол, достаточный для осуществления таких процессов: выдавливания смазки на контактных поверхностях; перекатывания со скольжением роликов в сужающуюся часть пространства между звездочкой и обоймой; деформации микронеровностей контактных поверхностей; деформации деталей МСХ. Кроме того, у МСХ без прижимных устройств устраняется зазор между роликами и сопряженными с ними рабочими поверхностями элементов этого Установим охранное оборудование. Тел. . Звоните! | |||||||||||||||||||||||||||||||||||||||||||||||