
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 механизма. Если угол ур недостаточен для осуществления этих процессов, то обойма не будет двигаться. Если он имеет какое-то граничное значение, то появится неустойчивое с остановками движение. И, наконец, когда величина угла t? больше этого граничного значения, обойма станет двигаться устойчиво. Все это указывает на невозможность теоретического определения tax, учитывая еще, что каждый процесс периода заклинивания зависит от ряда факторов, которые могут быть различными в зависимости от тех или иных условий. Поэтому максимальная величина передаточного отношения tmax была определена экспериментально. Зная этот угол, нетрудно определить среднее максимальное передаточное отношение вариатора, при котором он нормально функционирует, из выражения Для определения максимального передаточного отношения экспериментально находили минимальный угол tlmm, при котором обеспечивается устойчивое пульсирующее движение ведомого вала. Опыты проводили при различных значениях крутящего момента М, частоты включений tii МСХ и параметров МСХ (первоначального угла заклинивания а, числа роликов z, прижимного усилия Р). Исследованы образцы наиболее распространенной конструкции роликового МСХ, предусмотренной нормалью машиностроения МН = 3-61, с числом роликов z = 3 и 5. При исследовании были использованы МСХ с прижимными устройствами и без них (Р = 0). Прижимные усилия Р и углы заклинивания а находились в пределах, которые встречаются в МСХ современной техники (Р = 0; 0,035; 0,8; 1,5 и 7 кгс, а = - 4; 7 и 10°). На рис. 5 представлена схема экспериментальной установки. В кривошипно-кулисном преобразующем механизме кривошип состоит из жестко установленного на ведущем валу диска 9, сух-аря 10 и пальца 13 с насаженным на нем игольчатым подшипником 12. Длину кривошипа изменяли, смещая положение пальца относительно оси ведущего вала, перемещением сухаря по Т-образному пазу диска двумя винтами 8. Кулиса соединена при помощи вала 3 со звездочкой МСХ 23, являющегося в данном случае легко сменяемым узлом для возможности исследования образцов с различными параметрами. Обойма МСХ, жестко связанная с ведомым валом 22, неподвижно установлена в отверстие диска 17 колодочного тормоза 18, . служащего для создания нагрузки. Регистрировали последнюю , посредством динамометра 1, состоящего из упругого элемента и протарированного по крутящему моменту индикатора часового типа, предназначенного для визуального наблюдения величины М при настройке тормоза, а также в ходе опытов. Изменение вели- чины крутящего момента контролировали электрическим способом с помощью двух проволочных тензодатчиков 2, сигналы от которых поступали через усилитель 15 на осциллограф 14. Исследования проводили при значениях М = 3, 6, 9, 12 и 15 кгс-см. Для выяснения влияния частоты включений п МСХ на характер изменения передаточного отношения применяли регулируемый электродвигатель постоянного тока с независимым возбуждением, его регулирование осуществляли посредством реостата 7. Исследования проводились при частоте вращения ведущего 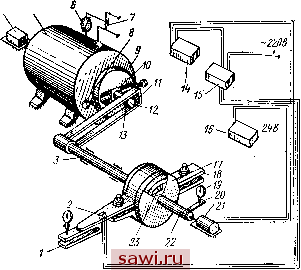 Рис. 5 вала, равной 15, 50, 100, 500 и 1000 об/мин (частота включений п МСХ). Величину п отмечали счетчиком частоты вращения 4 и вольтметром 6, предварительно протарированным по частоте вращения, последний служил также для контроля в ходе опытов постоянства настройки. Устойчивого вращения ведомого вала достигали регулированием угла размаха кулисы. Угол поворота ведомого вала, измеряли индикатором 19 часового типа, опирающимся своим измерительным стержнем на рычаг 20, установленный на этом валу. Угол находился следующим образом. По показаниям индикатора фиксировалось расстояние а (рис. 6) и величина подсчитывалась по формуле тш = - arcsin - , где / - расстояние от оси ведомого вала до оси измерительного наконечника индикатора; и -г число циклов включения МСХ в период определения величины а. Рис. 6 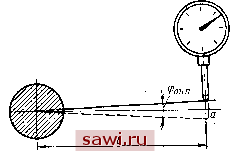 i-max 6000 IMOOmm Z=3 Р=0,8кге п=50(Ш 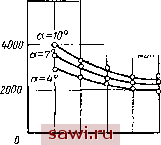 6000 2000
3 6 9 12 15 О 3 6 9 12 15 6000 2000 6000 иооо - гооо -п=
6000 2000
12 15 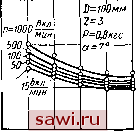 6000 ШО -. 2000 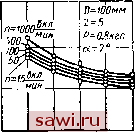 О 3 6 9 12 15 О 3 6 9 12М,нгс-м Рис. 7 Так как угол весьма мал, то находим величину угла поворота ведомого вала за несколько, десятков оборотов ведущего вала (40-60 циклов) и вычисляем среднеарифметическое значение. Контроль измерений ,угла в ходе опытов и определение наличия устойчивого пульсирующего движения ведомого вала осуществляли при помощи осциллографа 14 (рис. 5), регистрировавшего сигналы потенциометрического- датчика 21, последний получал питание постоянным током от аккумулятора 16. Были выполнены четыре серии опытов, каждый из которых повторяли по 6 раз.- ИссЛедования показали, что импульсные передачи могут функционировать при весьма высоком передаточном отношении, величина которого может доходить до 1400-1500. По данным экспериментов построены графики, приведенные на рис. 7. Они показывают изменение передаточного отношения tax в зависимости от нагрузки (крутящего момента М) при фиксированных значениях первоначального угла заклинивания а, числа роликов г, прижимного усилия Р и частоты включений п. Из анализа результатов экспериментов следует. Максимальное передаточное отношение tx . импульсной передачи возрастает с увеличением прижимного усилия Р, угла заклинивания а, частоты включения п, числа роликов z МСХ и с уменьшением нагрузки (крутящего момента М) на ведомом валу. Из всех упомянутых параметров наибольшее влияние на изменение величины tmax оказываст крутящий момент М, в меньшей степени - первоначальный угол заклинивания а и прижимное усилие Р, а наименьшее - число роликов z МСХ; частота включений п заметно влияет лишь при малых нагрузках на ведомом валу. Эти особенности надо учитывать при расчете и проектировании импульсных передач. Следует иметь в виду, что возможно, не увеличивая габаритов МСХ и всей передачи, достичь повышения imax за счет увеличения a,z, Р и п. Последнее условие можно выполнить, применяя двигатели с повышенной частотой вращения вала. . Поскольку в импульсных редукторах с весьма большим передаточным отношением при изменении нагрузки на ведомом валу величина передаточного отношения изменяется, то они работают, как самонастраивающиеся автоматические вариаторы. ОПРЕДЕЛЕНИЕ НОРМАЛЬНЫХ УСИЛИЙ НА ПЛОЩАДКАХ КОНТАКТА РОЛИКОВ И ЗВЕЗДОЧКИ У МСХ Нормальные усилия на площадках контакта роликов и звездочки iVa МСХ определялись на установке, аналогичной по принципу действия установке изображенной на рис. 5, с тем лишь различием, что в качестве преобразующего механизма был применен шарнирный четырехзвенный механизм [61]. Испытаниям были подвергнуты МСХ нормали машиностроения МН = 3-61 с числом роликов 3 и z=5, D = 100 мм,-а = 6°, к торцам звездочки которых с двух сторон прикреплялись стальные закаленные бал очки / с наклеенными проволочными датчиками 2 (рис. 8). Длина роликов 3 выбиралась такой, чтобы они перекрывали не только плоскости звездочки, но и плоскости балочек. Тензометрирование осуществлялось посредством осциллографа МПО-2. Испытания проводились при угле размаха звездочки ф = 10° с числом двойных колебаний в минуту 100, 200, 500 и 1000. Момент на тормозе равнялся 15 кгс-м для механизмов с тремя роликами и 25 кгс-м для механизмов с пятью роликами. 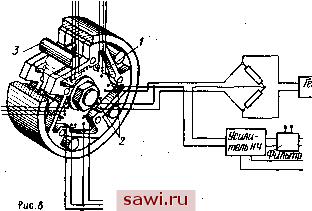 А ооцитграфу Перед каждым опытом строились тарировочные диаграммы, на которых фиксировались отклонения светового указателя шлейфа осциллографа для различных нагрузок, действующих на ролик. Как правило, испытания и тарирование датчиков производились при одних и тех же шлейфах осциллографа. На осциллограммах записывались одновременно три измеря- емые величины для механизмов с тремя роликами (рис. 9, а) и пять для механизмов с пятью роликами (рис. 9, б). Осциллограммы дают качественные характеристики изменения нормального усилия iVa за полный цикл движения МСХ. Во всех случаях в период заклинивания имеет место резкое повышение величины N- При малом числе циклов движения МСХ в минуту (верхние кривые на рис. 9, а и б) после заклинивания наблюдается четко выраженный период заклиненного состояния, когда измеряемая величина остается примерно постоянной. С увеличением скорости движения механизма благодаря действию на звенья механизма динамических усилий картина изменения нормального усилия становится иной. Если при Пц = 200 цикл/мин характер изменения усилия остается еще примерно таким же, Заклинен в еостоян е РашитЗашё 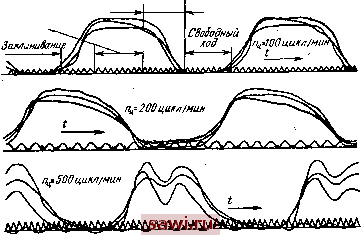 пЮООцикл/шн  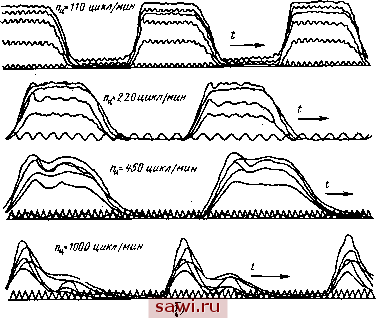 Рис. 9 9 в. Ф. Мальцев Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||||||||||||||||||||||