
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 йбреДачи и увеличению сил инерции коромысел, а также к тШ-шению динамических давлений в опорах ведущего вала вследствие возрастания неуравновешенного момента от центробежных сил инерции пазового диска и противовеса. Малое значение г при заданном io ведет к уменьшению Гг, а следовательно, к увеличению давлений на площадке контакта ролика коромысла и опорной 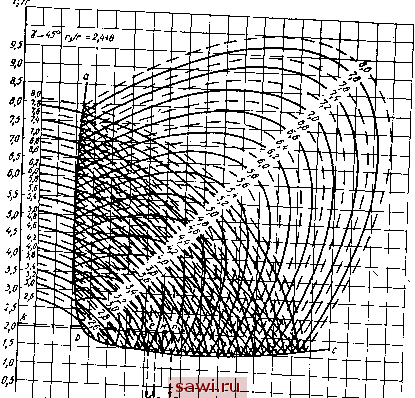 о 0,S 1,0 t,5 2,0 2,5 3,0 S,0 5,5 6,0 6,5 7,0 7,5, Bfi 6,5 9,0 9,5 r/r Рис. 4 поверхности кулачка диска, вследствие чего эта пара может оказаться наиболее слабым местом механизма передачи. У существующих передач величина г = 1030 мм. Нижний предел соответствует передачам малой мощности. По мере увеличения мощности значение г увеличивается. Для определения г можно рекомендовать ориентировочную формулу г = 0,18гз -Ь 5 мм. (24) Подсчитанные по этой формуле значения г близки к ее значениям в существующих импульсных передачах. После того, как будет определена величина г по известным (- и - по диаграмме (см. рис. 4), можно определить величину -7-)- Для этого проведем параллельно оси абсцисс прямую из точки К, лежащей на оси ординат и имеющей ординату (т-)-Эта прямая пересечет эллипсы, соответствующие величине - на диаграмме для примера принято- = 4,2 . Каждой точке, лежащей на прямой eh, соответствует искомая величина -y-jo-Наименьшему значению (-\ , как видно из диаграммы, \ /о mm будет соответствовать значение точки е. При удалении от этой точки и по мере приближения к точке h величина -7) будет возрастать, принимая в точке п значение (т ) Таким образом, можно выбрать бесчисленное множество значений -7- для преобразующего механизма в пределах от (~ ДО при определенных (j-- и (jy-g- Принимая во внимание, что симметричные механизмы обладают некоторыми преимуществами в отношении равномерности движения, необходимо прежде всего определить значение -j для этих механизмов, если проектируем с малой неравномерностью движения-. Точка пересечения М прямой Кп с дугой окружности, соответствующей найденному значению (-у- определит величину (-у-д для симметричного механизма. Однако при рассмотрении конструкции передачи видно, что если ri - радиус пазового диска, то величина -не всегда может быть осуществима конструктивно. В этом случае, руководствуясь конструктивными соображениями, на линии еп находят точку с нужной абсциссой Для различных конструкций регулирующих механизмов значения - различны. Для конструкций, показанных в гл. I на рис. 30 и 31, значение -7-) наименьшее; несколько большее - для конструкции, показаннойв гл. 1 на рис. 29, и самое большое - для конструкций, показанных в гл. 4 на рис. 1 и 7. Слишком большое значение - может привести к увеличению радиальных габаритов передачи. Поэтому при определении (y) необходимо стремиться, чтобы траектория крайних точек пазового диска не выходила за пределы радиальных габаритов зубчатой передачи. Для этого необходимо выполнить условие (25) Размеры звеньев симметричного механизма могут быть определены аналитически без помощи диаграммы, показанной на рис, 4. Пусть передаточное отношение передачи ig задано, а Гз определено. Прежде всего найдем значение г из формулы (24). Затем по формуле (22) определимвеличину Гг =-у. По формуле (17) arccos При этом должно быть у 45°; Подставляя найденное значение в формулу (14), получаем arccos (26) До сих пор при определении размеров звеньев преобразующего механизма передаточное отношение определяли приближенно по формуле (11) гл. 3. Поэтому действительное передаточное отношение спроектированного механизма будет несколько отличаться от заданного. Более точное решение может,быть получено: если передаточное отношение определять по формуле (12) гл. 3: 72 . - (27) Последнее соотношение может быть выполнено, если несколько изменить размеры звеньев спроектированного механизма и прежде всего размеры г и Гг. Но так как изменения в размерах звеньев при этом относительно невелики, то можно ограничиться изменением одного из них. Ниже рассматривается способ изменения величины г у спроектированного механизма с целью удовлетворения равенству (27). На рис. 5, а показан механизм OABOj, размеры звеньев г, tl, г2, Гз которого были определены изложенным выше методом. Для определения в этом механизме угла поворота коромысла Дг)1 за период рабочего движения воспользуемся методом, изложенным на стр. 82. Пусть этот угол будет между положениями коромысла OiBi и ОВг- Передаточное отношение передачи Для заданного передаточного отношения 72 , откуда Дг5о = где А\>о - угол поворота коромысла за период рабочего хода движения механизма, у которого передаточное отношение равно ig. Bi 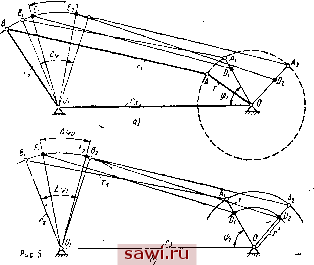 Чтобы спроектированный механизм имел заданное передаточное отношение io. необходимо, чтобы угол поворота коромысла в период рабочего движения был равен А\Зо. Зтого можно достигнуть путем изменения величины г. Предположим, что, i < io, и тогда A\)i > При длине кривошипа, равной г, угол поворота коромысла в период рабочего движения будет равен Дг)о. В этом случае величина г определяется по рис. 5, а, если отложить внутри угла A\)i угол Аг)о, определенный по уравнению (28). Из точек пересечения £i и £2 сторон этого угла с окружностью радиуса г2 делаем засечки раз- мером Гх на радиусах ОЛ i и ОЛ 2, определяя точки пересечения Dl и Dg. Затем рядом последовательных приближений находим (рис. 5, б) положение сторон Oii и Oif а угла Аг)о, при котором ODi = OD2 = г. . (29) Полученная величина г определена при условии неизменного угла ф1. В действительности Ч; изменением г изменяется и величина ф1, но это изменение в данном случае настолько незначи- тельно, что им без ущерба для точности можно пренебречь. В тех случаях, когда не требуется особой точности, можно пользоваться формулой, дающей приближенное значение: ODi + OD2 2 г == (30) Окончательные размеры звеньев механизма при заданном i будут г, Гх, Гз и Г3. Аналогично можно определить г и для случая, когда i > {о- Таким образом, определение длины звеньев преобразующего механизма передачи состоит из решения двух задач: определения длин звеньев с учетом передаточного отношения по формуле (II) в гл. 3, дающей приблизительное значение; определения длины кривошипа г с учетом передаточного отношения передачи, выраженного формулой (12) в гл. 3, дающей более точные результаты. Изложенным методом можно воспользоваться при проектировании двухкривошипных преобразующих механизмов, свойственных планетарным и некоторым системам автоматических импульсных передач. Если двухкривошипный четырехзвенный механизм преобразовать, воспользовавшись методом обратимости движения, то в результате получится кривошипно-коромысловый механизм, поставленный на ведущий кривошип, где роль кривошипа будет выполнять стойка исходного механизма. Так как экстремальные значения углов передачи у обоих механизмов будут наблюдаться в положениях их звеньев, когда положения ведущего кривошипа и стойки совпадают, то эти углы для исходного и преобразованного механизмов одинаковы. Это дает основание вести синтез преобразованного механизма, используя все данные, найденные применительно к этому механизму, т. е. к механизму относительного движения, при переносном движении совместно с ведущим кривошипом исходного механизма. Синтез шарнирного четырехзвенного преобразующего механизма импульсной зубчато-рычажной передачи из условий минимизации неравномерности вращения ведомого вала и учета допу-стимого угла передачи разработан С. А. Чекурдиновым и М. К- Усковым. Угловую скорость ведомого звена преобразующего механизма можно записать в функции времени 2=9 (t) (Oi, где q (t) = i(t) (31) переменное передаточное отношение, равное отношению угловой скорости ведомого звена (коромысла) со 2 к угловой скорости кривошипа coi. В период рабочего движения угловая скорость коромысла монотонно изменяется (см. гл. 2, рис. 2), переходя через макси- мальное значение. Принимая угловую скорость кривошипа со постоянной, разложим функцию q (t) в ряд Тейлора в окрестности точки ее максимума: 2 = Щт + 1 dW,; 1 1 dt 1 dwn, 21 dt (А0 + ..., (32) где со2m - максимальное значение угловой скорости коромысла. Афк 2.=о при максимальном значении ш 2, Так как = то, используя ряд (32), ограниченный тремя членами, запишем А(1)2 == 2 1 dmn 21 dt (33) где Аф - угол поворота ведущего кривошипа за время А. После дифференцирования дважды выражения (31) получим - -г1 = ЯтЪ (34) где ф - текущий угол поворота кривошипа; q - наибольшее передаточное отношение преобразующего механизма, соответствующее наибольшей скорости коромысла. В данной конструкции преобразующие механизмы равномерно расположены вокруг ведущего вала передачи, и, следовательно, угел поворота кривошипа Аф при k преобразующих механизмах можно выразить Аф = тогда формулу [(33), с учетом уравнения (34) запишем так: ( Acog (35) Из последнего уравнения можно заключить, что неравномерность вращения коромысла преобразующего механизма в период рабочего хода, а следовательно, неравномерность вращения ведомого вала передачи зависит от абсолютного значения второй производной передаточного отношения q по углу поворота ф кривошипа, соответствующего положению механизма, когда угловая частота вращения коромысла становится максимальной [105]. Этот результат дает возможность решать задачи синтеза с учетом неравномерности вращения ведомого вала как при проектировании импульсных передач с минимальной неравномерностью вращения, так и передач, предназначенных для машин, требующих пульсирующего движения. По формуле (35) найдем (36) Построим стойку AD = I <рис. 6) шарнирного четырехзвенника. По заданному передаточному отношению qm определим Установим охранное оборудование. Тел. . Звоните! |