
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 положейие мгновенного mntoca р относительного движения кривошипа и коромысла от шарнира D [105]: 1 (37) Проведя прямоугольные оси координат X, Y с началом координат в полюсе р и осью X, направленной по стойке, определим геометрические места подвижных шарниров В и С кривошипа и коромысла. Эти геометрические места соответственно описываются окружностями d и е, проходящими через полюс р с центрами N и М па оси X и координатами л д/ - --гт-- , 2[?m+?m(?m-l) (2-9 )] (38) 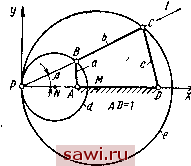 Хм = . (39) После построения окружностей due проведем через по-Рис. 6 люс р прямую / под произвольным углом р к оси X и обозначим точки ее пересечения с указанными окружностями В и С и примем эти точки за подвижные шарниры четырехзвенника. Тогда в резуль-(гате соединения шарниров В с А и С cD получим схему шарнирного четырехзвенника ABCD в тоя его положении, когда передаточное отношение принимает максимальное значение, а вторая производная передаточного отношения по углу поворота кривошипа соответствует заданноц, неравномерности вращения Acog коромысла. При AD = Гд = \ и данном угле р длины звеньев преобразующего механизма будут Ъ == У{хс~Хв? + {Ус-Ув?\ (40) (41) (42) XB=-2x[iCosP; ув = Хв1гР; хс = 2хм cos Р; г/ = tg р. Если через полюс провести прямые под различными углами р. То можно получить множество механизмов, у которых 9 и Acog будут неизменными. Однако в импульсных передачах из этого множества могут быть использованы только механизмы, у которых минимальный угол передачи равен или больше допустимого. Последнему условию будут удовлетворять не все механизмы множества, а только часть, подвижные шарниры которых расположены на ограниченных участках окружностей d и е. При синтезе преобразующих кривошипно-коромысловых механизмов импульсных передач по условию заданной неравномерности движения, определенной в период рабочего движения, необходимо учесть следующее. 1. С уменьшением частоты вращения ведомого вала кинематическая величина Асо- уменьшается, в то время как коэффициент неравномерности б возрастает (см. рис. 10 в гл. 5). 2. Шарнирные четырехзвенные преобразующие механизмы - могут обеспечить неравномерность вращения ведомого вала в определенных границах. Если заданная неравномерность выходит за пределы этих границ, то в качестве преобразующих механизмов применяют кулачковые механизмы или рычажные с большим числом звеньев. 3. Неравномерность можно изменять в широких пределах за счет числа преобразующих механизмов. Однако следует иметь в виду, что с увеличением числа преобразующих механизмов снижается неравномерность вращения и одновременно уменьшается диапазон регулирования частоты вращения передачи. 4. В процессе регулирования передачи, с увеличением частоты вращения ведомого вала, и следовательно, с увеличением длины кривошипа г уменьшается угол передачи. Поэтому необходимо определять звенья преобразующего механизма при максимальном значении г = гх- 5. Чтобы не увеличивать радиальные габаритные размеры, следует стремиться выполнить неравенство (25). Рассмотрим два типичных случая расчета преобразующих механизмов из условия необходимой неравномерности вращения ведомого вала. 1-й случай. Определение длин звеньев преобразующего механизма при минимальной неравномерности вращения. Для фиксированного значения 17 и последовательных значений 7 построим в той же системе координат ху семейство окружностей d я е (рис. 7) и пучок прямых из начала координат под различными углами р [105]. В результате получим область механизмов, удовлетворяющих постоянному значению при изменяющемся q (на рис. 7 = 0,2; 7=-0,16;-0,17;-0,18). В этой области построим замкнутые зоны, очерченные кривыми равных . минимальных углов передачи == - 45°, Vniin = 50° и т. д. (утолщенные кривые на рис. 7). Внутри зон располагаются шарниры С кривошипно-коромысловых механизмов, у которых минимальные углы передачи больше соответствующих граничных значений. 80° 75° 70° 65° 60° 55° 50° М° W° 35° 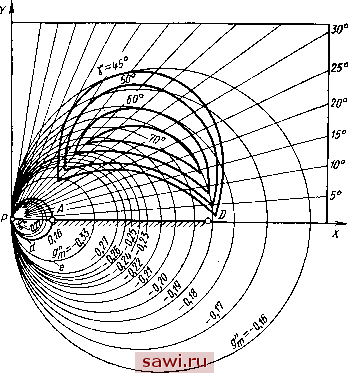 Рис. 7 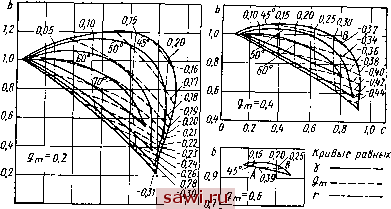 0,2 0,t 0,В 0,3 КО 1,2 с 0,2 0,4 Рис. 8
0,1* 0.6 0,8 ХО 1.2 с Построение зон дает возможность установить границы изменения q i, а следовательно, и границы Acoj при фиксированном значении q- Данный метод позволяет построить диаграммы изменения b в зависимости от с при Гз = I (рис. 8), необходимые для практики расчетов кривошипно-коромысловых преобразующих механизмов по заданной неравномерности вращения Acu2> Чт и допустимому углу передачи. На диаграммах сплошными линиями показаны границы, определяющие значения b и с для механизмов с равными минимальными угла- ми передачи. Пунктирные линии соответствуют равным значениям (7m(Acu2), а штрихпунктирные линии соответствуют равным значе- 1,0 ниям длины кривошипа г. На рис. 9 показана диаграмма 0,8 изменения, величин 6 от с шарнирных четырехзвенников с пере- 0, даточными отношениями q = 0,1ч-0,6 и V = 45° при мини-а мальном значении qiAut). Построение последней диаграммы показало, что наибольшее значение передаточного отношения q i о 0.2 у механизмов с углом у ~ 45° Рис. 9 можно принять 0,6. Величину qm приближенно можно определить так: 2 ср -Ь Асоз 7. = -5г- Ай)2 = 2 ((/ (01 - (02 ср). (44) где со2ср - средняя угловая скорость коромысла преобразующего механизма в период рабочего движения. Если заданы наибольшая угловая скорость ведомого вала сйах и угловая скорость вала электродвигателя ©i и определена длина стойки Гз (расчетом на выносливость зубчатой передачи и роликового МСХ), то, приняв q = 0,6, можно расчет длин звеньев вести в следующей последовательности. На основании рекомендаций, приведенных на стр. 87, принимаем число преобразующих механизмов k (обычно k = 5), затем из графика (см. рис. 5 в гл. 3) находим передаточное отношение зубчатой передачи i. Так как при наибольшем значении длины кривошипа (лр - = тахг- ТО ПО формулс (44) опредсляем Ай)2 =2 (0,6(01 - u)n,axQ * и, используя выражение (36), найдем q- Определив предварительно г из соотношения (24), найдем длину коромысла, используя выражение, (23): Гч =г-i- I,. Вшах По формулам (37), (38) и (39) определяем расстояние полюса от шарнира D стойки и координаты % и х центров окружностей геометрических мест подвижных шарниров искомого четырехзвенника. Путем ранее указанного построения окружностей d и е (см. рис; 6) при известных значениях а = - и с = - находим построением относительную длину шатуна 6==-. Используя соотношение (13) в гл. 3, определим угол размаха коромысла .в период рабочего движения, соответствующий Аг)о = 2я;шп И подобный угол Аг) находим для преобразующего механизма с вычисленными значениями длин звеньев методами кинематического анализа (см. стр. 82). После сравнения углов Аг) и Аг]) производим корректировку длин звеньев аналогично корректировке, изложенноцна стр. 273 (см. рис. 5). Отличие в этом случае будет состоять в том, что подвижные шарниры механизма должны находиться на окружностях d и е (см. рис. 6) или в непосредственной близости от них. Чтобы убедиться, что в результате корректировки углы передачи не выходят за пределы допустимых, следует определить их экстремальные значения или воспользоваться диаграммой, показанной на рис. 4. 2-й случай. Определение длин звеньев преобразующего механизма по. заданной неравномерности вращения. Этот случай расчета характерен для вариаторов, обеспечивающих в приводах машин пульсирующее движение исполнительных органов. Пусть заданы: коэффициент неравномерности вращения ведомого вала б при наибольшей частоте его вращения; Пшах - величина этой частоты; частота вращения вала электродвигателя п-, передаточное Отношение зубчатой передачи i. Межосевое расстояние зубчатой передачи и модуль зацепления т определяются предварительно при расчете зубчатой передачи и роликовых МСХ на прочность. Коэффициент неравномерности вращения можно вычислить по формуле (45) где Асо = ©шах - шш ®ср - средняя частота вращения ведомого вала за цикл. В данном случае Асо Юср = И тогда, исполь- 1г f 30 зуя формулу (45), определим приращение частоты вращения коромысла в период рабочего движения: д яб гЯшах Ориентируясь на эту величину, выбираем число преобразующих механизмов к. Передаточное отношение Цт приближенно рпре,елим (см. рис. 2 в гл. 3) так: <02 ср + 4 Цт = при шах шах гЯшax (1 + 0.56) 1 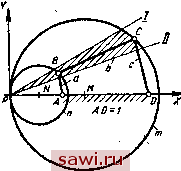 Рис. 10 Вторую производную передаточного отношения ах по углу поворота кривошипа ф определим иа основании выражения (36): 26tz max 9шах - Находим координаты полюса /др и центров N я М окружностей, на которых расположены подвижные шарниры искомого четырехзвенника, используя для этого соотношения (37), (38) и (39), затем построив (рис. 10) данные окружности и проведя лучи / и из полюса р, ограничивающие множество шарнирных четырех--звенных механизмов с допускаемыми минимальными углами передачи; по найденным с помощью формул (23) и (24) значениям а = - и с - определяем относительную длину шатуна Ъ = -. При этом у искомого шарнирного кривошипно-коромыс- лового преобразующего механизма подвижные шарниры должны находиться на окружностях в зоне, ограниченной лучами / и (заштрихованная зона). Полученные размеры длин механизма можно уточнить за счет корректировки, как и в ранее рассмотренном случае. Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||||||||||||||||||||||||||