
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 If =90° КуЛйснЫё механизмы Преобразующие механизмы с качающейся кулисой в силу значительного различия законов движения ведомого звена при прямом и обратном движении, большого угла передачи (до 90°) и относительно большой редукции угловых скоростей и трансформации Крутящих моментов позволяют расширить кинематические, динамические и эксплуатационные возможности импульсных передач. Если при прямом движении угловая скорость изменяется плавно, то, используя прямой ход в качестве рабочего, можно достигнуть снижения неравномерности вращения ведомого вала, в то время как использование обратного хода для рабочего движения позволит расширить диапазон регулирования, если неравномерность вращения не влияет на работу исполнительных органов машины, а для приводов, предназначенных для машин с пульсирующим движением, получить необходи- Т\ JJ \. ~Г)9№ интенсивность импуль- - \у сов. При наличии в системе испульсных передач МСХ использование прямого или обратного хода в качестве \ рабочего движения зависит от направления вращения вала приводного двигателя. Итак, изменением направления вращения вала двигателя у импульсных передач с кулисными преобразующими механизмами достигается существенное расширение их возможностей. Особенности конструкции импульсных передач и прежде всего стремление заменить трение скольжения трением качения в поступательной паре кулисного механизма (см. рис. 7 и 18 в гл. 1) обусловили применение нецентральных кулисных механизмов. Наиболее совершенным нецентральным кулисным механизмом в смысле передачи усилий от ведущего вала к ведомому является механизм (рис. 18 в гл. 1), у которого направляющая кулисы пересекает центр качения кулисы. В этом случае угол- передачи остается неизменным и равен у = 90°, у всех других нецентральных кулисных механизмов у < 90°. 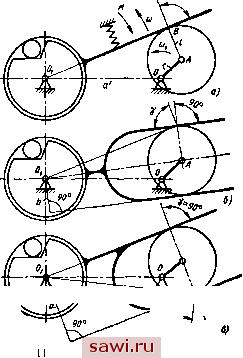 Рис. Таким образом, при проектировании рассматриваемых преобразующих механизмов с углом у = 90°, когда кривошип выполнен в форме эксцентрика, необходимо плоскость контакта кулисы с эксцентриком расположить так, чтобы она при своем продолжении проходила через ось качания кулисы. На рис. 11 показаны два варианта выполнения эксцентриковых механизмов с силовым замыканием пружиной (рис. 11, а) и связью двустороннего действия (рис. 11, б и в). При симметричном расположении направляющих кулисы (см. рис. 11,6) угол передачи у < 90°. Для импульсных передач представляет интерес применение преобразующих механизмов с несимметричными кулисами (рис. 11, в), которые дают возможность осуществлять рабочее движение при у = 90°, а свободный ход при меньшем угле. Для определения длин звеньев кулисного преобразующего механизма должны быть известны наибольшая частота вращения ведомого вала ау., частота вращения кривошипа (о, крутящий момент М на ведомом валу передачи. Для механизма при b = О (см. рис. 11, а) радиус эксцентрика / можно определить из расчета на контактную прочность, используя формулу Герца: о. = 0,418 1/- (46) где Q = 7--нормальное усилие в месте контакта эксцен- i-min трика с направляющей кулисы; Ь - минимальное плечо силы Q вокруг центра Оi; Е - приведенный модуль нормальной упругости материалов эксцентрика и направляющей кулисы; - ширина эксцентрика; рпр - приведенный радиус кривизны; - контактное напряжение в месте соприкосновения эксцентрика с направляющей кулисы. Так как для плоской направляющей кулисы рпр = / . то на основании формулы (46) имеем .0,175Л1£пр (47) Приближенно среднее передаточное отношение при соах можно записать, используя формулу (34) в гл. 3: (0j 0)шах (48) где L - среднее расстояние центра ползуна от оси качания кулисы - точки О (см. рис. 11); Ь- длина стойки; г - наибольшая длина кривошипа. Из рассмотрения конструкций вариантов с преобразующими кулисными механизмами следует (49) где dl - наружный диаметр ступицы кулисы. Данное неравенство обусловливает возможность движения эксцентрика за полный оборот кривошипа без задевания за ступицу кулисы. Так как обычно в ступице кулисы располагается роликовый МСХ, то диаметр d определяется при расчете на прочность этих механизмов. При проектировании механизмов с минимальной длиной стойки последнюю можно определить на основании формулы (49), учтя зазор б между ступицей и эксцентриком при их сближении: а-=14-г + +8; (50) зазор можно принять б = 2--4 мм. Эксцентрики могут быть выполнены насадными или за одно целое с валом. В обоих случаях радиус эксцентрика можно определить согласно рис. 12: (51) где - диаметр ведущего вала, определяемый расчетом на прочность; Рэ - коэффициент,\ учитывающий конструкцию эксцентрика (Рэ = 0,7-1-0,9 - для насадных эксцентриков; Рэ = 0,5 - для эксцентриков, выполненных вместе с валом; Рэ = 0,9-1,3 - для эксцентриков с насаженными подшипниками качения; Рэ = = 1,5-г-1,8 - для регулируемых эксцентриков с насаженными подшипниками качения). В результате совместного решения уравнений (48), (50) и (51) передаточное отношение в безразмерной форме можно записать /(3+C)-(4-)4/(l+C)-(-f)\ (52) 0,51 + Рэв + б По данньму уравнению на рис. 13 построены кривые изменения i в функции отношения t/r для фиксированных значений величины С в диапазоне ее изменения, соответствующем конструкциям импульсных передач. На оси ординат отложены значения передаточного отношения i при / = О, соответствующие центральным кулисным механизмам. Из соотношения (51) видно, что 1/г > 1, и, следовательно, реальная область изменения i на рис. 13 будет лежать правее пунктирной линии, параллельной оси ординат. Используя последний график, определение длин звеньев можно вести в следующей последовательности. Расчетом на прочность роликового МСХ находим диаметр наружной обоймы dl и приближенным расчетом на кручение по пониженным допускаемым напряжениям определяем диаметр вала d. В зависимости от конструкции эксцентрика принимаем коэффициент Рэ и назначаем величину зазора 6. Определив среднее передаточное отношение i = - по графику (см. шах 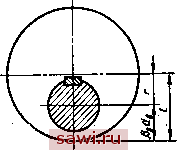 Рис. 12 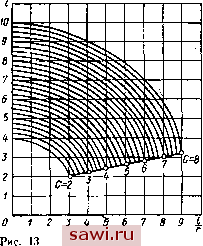 рис. 13) находим ориентировочно величину С и соответствующее ей отношение Ifr, при этом, очевидно, с увеличением С растет и величина 1/г, а следовательно, увеличиваются габаритные размеры преобразующего механизма, в то время как малые значения 1/г могут не обеспечить контактную прочность в месте соприкосновения эксцентрика с направляющей кулисы. По известной величине С находим значение г == (53) а из выражения (51) определяем величину /, а затем по формуле (50) вычисляем длину а стойки. Проверяем на контактную прочность эксцентрик и направляющую кулисы, предварительно вычислив минимальное расстояние от центра колебания кулисы до точки контакта с эксцентриком: Используя формулу (47У, определяем радиус эксцентрика / . Если 1 > I, то определяем IJr и по графику (см. рис. 13) для известного передаточного отношения i находим величину С. ,При неизменных d, и d находим величину зазора б = Сг - 0,5di - рзз и производим перерасчет длины стойки. Уточнение решения производим при определении среднего передаточного отношения по формуле (33) в гл. 3: 2ясй, С учетом выражения (25) в гл. 3 передаточное оТношение будет 2-------- (54) . / г sin ф \ фк , arctg ( -;-j- ) + arctg Уа 4- г2 - /2 4- 2 arccos ф ) По этому уравнению определяемреднее передаточное отношение i и корректируем его до заданной величины за счет изменения длины г кривошипа. Если величина i до корректировки больше заданной, то длина кривошипа при корректировке увеличивается, и тогда необходимо проверить выполнение условия возможности движения эксцентрика без задевания за ступицу кулисы, т. е. выполнение неравенства (49). Глава 12 РАСЧЕТ И ПРОЕКТИРОВАНИЕ РОЛИКОВЫХ МСХ ОСНОВНЫЕ КОНСТРУКЦИИ МСХ Из всего многообразия МСХ, применяющихся в импульсных передачах, наибольшее распространение имеют роликовые механизмы с цилиндрическими роликами и единичным их расположением на контактных поверхностях. Типичной конструкцией такого механизма является конструкция, предусмотренная нормалью машиностроения МН-3-61 Муфты обгонные роликовые . Механизм (рис. 1) состоит из следующих основных конструктивных элементов: наружной обоймы 1с внутренней цилиндрической поверхностью, внутренней обоймы 2 Ь вырезами (звездочка) и роликов 3. Нля обеспечения постоянного соприкосновения роликов с рабочими поверхностями обойм и, следовательно, для обеспечения постоянной готовности механизма к заклиниванию служит прижимное устройство, состоящее из пружины 6 и прижима 7. Перемещение роликов в осевом направлении ограничивается двумя щеками 4, закрепленными на ступице звездочки посредством стопорных колец 5. Для передачи больших крутящих моментов применяют механизмы с увеличенным числом роликов с внутренней (рис. 2, а) или наружной (рис. 2, б) звездочками, в которых ролики 4 удерживаются на равных расстояниях сепаратором / и прижимаются к рабочим поверхностям обоймы и звездочки кольцевой пружиной 2. Один конец пружины соединен с сепаратором, другой - со звездочкой. Сепаратор, как ц индивидуальные прижимные устройства механизмов нормали, поддерживает непрерывный контакт роликов с обоймой и звездочкой, способствуя одновременному заклиниванию роликов и более равномерному распределению нагрузки между ними. Кольцо 3 ограничивает осевое перемещение сепаратора и позволяет ему свободно поворачиваться вокруг оси звездочки. Сепаратор и рабочие поверхности звездочки изготовляются с высокой точностью. Данный механизм не только обладает повышенной нагрузочной способностью, но и может функционировать с большой частотой включения. Установим охранное оборудование. Тел. . Звоните! |