
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 более широкое распространение в различных областях техники вследствие следующих основных преимуществ: их можно изготовлять как стандартные детали, что, облегчает проектирование и изготовление МОХ; в пространстве между обоймами их можно расположить больше, чем цилиндрических в обычном МСХ при одних и тех же габаритных размерах механизмов, что дает возможность механизмам с эксцентриковыми роликами передавать большой момент; радиус кривизны рабочей поверхности значительно больше радиусов цилиндрических роликов, и, следовательно, контактные 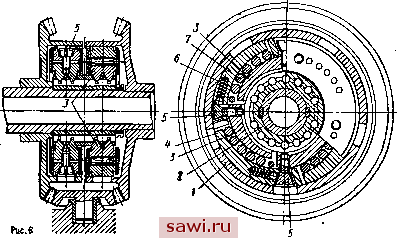 напряжения в местах соприкосновения роликов с обоймами в ме хаНизмах с эксцентриковыми роликами меньше. Но так как у этих механизмов ролики не вращаются, то в период свободного хода потери на трение больше, чем в механизмах с цилиндрическими роликами, и, кроме того, возможен местный износ (лыски) роликов. -- Оригинальная конструкция МСХ (рис. 6) с групповым расположением роликов и промежуточными клиньями была применена проф. В. И. Заславским в автоматической импульсной передаче (см. рис. 24 в гл. 2). В этой конструкции (рис. 6) между внешней / и внутренней 2 с обоймами попарно помещены криволинейные клинья 3 и4, между которыми находятся ролики 7. При вращении наружной обоймы по часовой стрелке (рис. 6, справа) ролики защемляются между клиньями так, что при этом движение передается внутренней обойме; при вращении в прютивоположном направлении имеет место свободный ход. Чтобы удержать в постоянном соприкосновении клинья 3 и 4, а также ролики 7 и внутреннюю обойму 2 при воздействии центробежной силы, предусмотрены пружины 6, сжатие которых регулируется винтами 5. Импульсные передачи с МСХ одностороннего действия в отличие от передач других типов являются jнереверсивными. Их реверсирование возможно при применении реверсивных МСХ. Одна из типичных конструкций реверсивного роликового МСХ импульсных передач показана на рис. 7, а. Звездочка / этого механизма имеет плоские или слегка вогнутые грани, на которых размещены ролики 2, удерживаемые в определенном положении посредством бронзового сепаратора 3. Звездочка и сепаратор соеди- 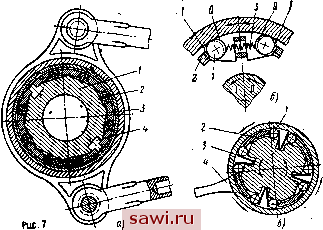 нены между собой специальными скользящими шпонками 4, призматическая часть которых помещена в выполненные параллельно оси механизма канавки на звездочке, а цилиндрический хвостовик введен в спиральную каиавку сепаратора. Если шпонки передвигать вдоль оси, сепаратор поворачивается по отношению к звездочке, изменяя положение роликов на ее рабочей поверхности. В зависимости от направления осевого перемещения шпонок определяется направление заклинивания, а следовательно, и направление передачи крутящего момента. У реверсивного МСХ на рис. 7, б ролики / попарно прижимаются к переключающей вилке 2 пружинами 3. В зависимости oj положения вилки одна группа роликов может находиться в контакте с обоймой и звездочкой (положение роликов /) и передавать движение в нужном направлении, в то время как другая группа роликов с противоположным направлением saKJiHHHBaHHH лишена этой возможности (положение роликов Ilj. По такому же принципу действует механизм (рис. 7, в) с V-об-разиыми плоскими пружинами 3, помещенными в прорези звездочки /. Реверсирование осуцествляется непосредственно поворотом рукоятки 4, соединенной с вилкой 2. ГЕОМЕТРИЧЕСКИЙ РАСЧЕТ РОЛИКОШХ МСХ Известно большое число МСХ с различной геометрией основных звеньев, однако не все они нашли применение в импульсных вариаторах. Это объясняется тем, что при выборе геометрии главных элементов МСХ на практике приходится, руководствоваться соображениями кинематического, динамического, технологического и эксплуатационного характера. Наиболее простыми и дешевыми в изготовлении являются механизмы, схемы которых показаны на рис. 8, а и б. Контактные поверхности звездочек в этих механизмах выполнены в виде плоскости.  Диаметр d ролика и диаметр D отверстия наружной обоймы определяют в результате расчета на прочность (см. стр. 312), а угол заклинивания ее принимают на основании опытных данных; расчёту подлежит величина С, которая в соответствии с обозначениями на рис. 8 равна С= (;? + г) cos а :я г (1) с = г l{Ki + 1) cos + 1 ]. где Ki = ~р--для механизмов с внутренней звездочкой; Ki ~ R -h2r - ---ДЛЯ механизмов с наружной звездочкой. Верхние знаки в этой и других формулах относятся к меха-, низмам с внутренней звездочкой, а нижние - к механизмам с наружной звездочкой. Если принять Кл = 8 и а = 7°, то для механизмов с внутренней звездочкой С= 5,94л а для механизмов с наружной звездочкой С = 7,95л Необходимо отметить, что Измерение величины С в процессе шлифования рабочих плоскостей на плоскошлифбвальном станке легко осуществляется обычными методами при помощи индикатора и концевых мер. Обозначим: Rq и R- наибольший и наименьший предельные размеры радиуса отверстия обоймы; Гб и г - наибольший и наименьший предельные радиусы ролика; ctg и ос - наименьшее и наибольшее значения угла заклинивания; Cg и С - наибольшее и наименьшее значения величины С. В соответствии с формулой (1) будем иметь: для МСХ с внутренней звездочкой Сб = (м ~ Гб) cos а - Гб; См=(б--м)со5аб-- ; для МСХ с наружной звездочкой Сб-(м + м) cos + /- ; С ==(Рб4-б)со8аб+Гб. Расстояние К равно К = {R г) sin а. (3) Расстояние от центра звездочки до оси прижимной пружины определяется по формуле Ci = (R г) sin р. (4) Для нормальной работы роликового МСХ первостепенную роль играет угол заклинивания. Чтобы выяснить влияние основных геометрических параметров на величину угла за.клинивания, не ходя из формулы (1) запишем Как следует из этой формулы, небольшое изменение в размерах Сиг приводит к значительному изменению угла заклинивания. Это изменение сильнее сказывается при меньших значениях Kv Отношение - и величина Ki могут изменяться как в результате неточности изготовления, так и в результате изнашиваемости рабочих поверхностей деталей механизма. Так, при /Ci = 8 и а = 7° изменение всего лишь на 0,01 величины - вызывает изменение угла а на Г 30 для МСХ с внутренней звездочкой. В процессе работы механизма изнашиваемость рабочей поверхности звездочки происходит лишь на узкой площадке. Поэтому при ремонте в случае значительного износа площадки контакта ее можно сдвинуть в ту или иную сторону за счет применения роликов других диаметров (такие роликина рис. 8, а показаны тонкой линией). Однако такой рациональный метод ремонта не пригоден для указанных механизмов, в которых рабочая поверхность звездочки выполнена в виде плоскости. Это объясняется тем, что с изменением диаметра ролика зАачительно изменяется угол заклинивание. Практически с целью уменьшения влияния изменения основных размеров механизма на изменение угла заклинивания (по сравнению с механизмом, изображенным на рис. 8) рабочую поверхность, звездочки выполняют цилиндрической с направляющей в виде окружности или логарифмической и архимедовой спирали. На рис. 9, а и б показана схема механизма со звездочкой, рабочая поверхность которой очерчена по дуге окружности. Центр-этой окружности несколько смещен относительно оси механизма. Марифмичес- 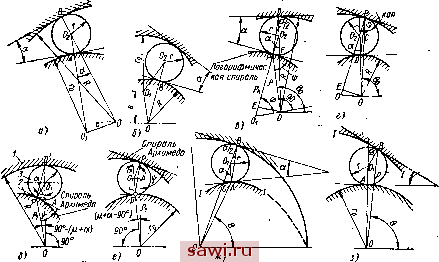 Рис. 9 Соответственно обозначениям на рис. 9 угол заклинивания будет определяться формулой а = arccos 2{R + г) (Го ± г) Найдем величину г, которая соответствует наименьшему изменению угла а при отклонениях радиуса г ролика от номинальной величины дг 2{/? q:r)2 (Го + г)2 jAi cos2a . . откуда ГоЯ 2г. Подставляя значение в формулу (6), определяем а = 2 Srcsin 2(R± г) (7) (8) Тогда величина эксцентриситета призаданном угле заклинивания е = 2{Яг) sin Чтобы определить величину гь, изменение которой менее всего влияет на изменение угла заклинивания, на основании формулы (6) вычислим (ro±r)-(J? + r) + e о 2(/?=Fr)(ro±r)2jAl cos2a , = 0. Из последнего выражения имеем roYiRrf-er={Rr)cosar. (10) Подставляя значение Го в формулу (6), определяем е = (i? q= г) sin а. (11) Проведенные исследования показали, что для реальных роликовых МСХ величины ло и е, подсчитанные по формулам (10) и (11), мало отличаются jOT величин, вычисленных по формулам (7) и (9). Поэтому значения радиуса г о и эксцентриситета е, определенные по формулаь[ (7) и (9), дают наименьшие отклонения угла заклинивания при отклонениях не только радиуса ролика г, но и величины Го от своих номинальных размеров; в этом смысле эти значения являются наивыгоднейшими. Наибольшее изменение угла заклинивания при изменении диаметра ролика имеет место у механизмов с профильной поверхностью звездочки, очерченной по логарифмической спирали (рис. 9, в и г). Если принять за полярную ось луч с радиусом-вектором, равным единице, то уравнение логарифмической спирали в полярных координатах с полюсом в точке О будет иметь вид p = e9=g*, (12) где р и 9 - полярные координаты; е = 2,718; ф - постоянный угол между касательной, проведенной в точку контакта Р ролика с рабочей поверхностью звездочки, и радиусом р = ОР. Из точек О и Р (рис. 9, в) опустим перпендикуляры на линии OJ и 0D. Из треугольников OPF и OJF, а также треугольников ОЕР и 00 соответственно следует P£ = rslna = piCOS( + a); ?х=~фц (13) O£ = psln(90°-.,) = (i?-r)£ina; 1- еозГ (14) Установим охранное оборудование. Тел. . Звоните! |