
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 / о - радиус внутренней обоймы; - радиус кривизны профили-, рующей кривой звездочки, соответствующий точке соприкосновения с роликом. Здесь р имеет следующие значения: для механизма с плоской рабочей поверхностью звездочки Р = 1; для Механизмов с круглой цилиндрической поверхностью звездочки где радиус цилиндра = Го-f 2г; для механизмов, имеющих цилиндрическую рабочую поверхность с направляющей по логарифмической спирали, й 1 cos (а + -ф) sin t. sin а ДЛЯ механизмов с направляющей цилиндрической рабочей поверхности звездочки по спирали Архимеда Р=1 + где pi - радиус-вектор спирали Архимеда в точке контакта ролика и звездочки, который определяется по формуле (26); а - постоянный коэффициент уравнения спирали Архимеда; для механизмов, имеющих цилиндрическую рабочую поверхность звездочки с направлякэщей по кривой, описываемой формулой (29) и обеспечивающей постоянство угла заклинивания [611, P=l+-f, где р - радиус кривизны. Контактное напряжение <г = 0,142у ?>МрЕ zrlpr откуда d = 0,432 2) [т] tg-f (70) (71) При 1 = 8, k2 = 2, а = 7°, £ = 2-10 кгс/см и [т] = = 5000 кгс/см d =-0,206 318 Расчет механизмов с эксцентриковыми роликами. Расчет на контактную прочность. Рассмотрим механизм с эксцентриковыми роликами, рабочие поверхности которых очерчены со стороны наружной обоймы радиусом Tj и со стороны внутренней обоймы радиусом Га- Руководствуясь обозначениями, показанными на рис. 7 гл. 6 для равновесного состояния механизма, используя формулы (74) и (75) гл. 6, найдем нормальные усилия Ni а определим приведенные радиусы кривизны рп и рп в точках соприкосновения ролика с обоймами: для наружной обоймы М -- для внутренней обоймы гго tg Фо Подставив в уравнение (43) значения величины Ni, рп и N, Рп1 получим наибольшее контактное напряжение сдвига в месте контакта ролика с наружной обоймой г=0,2]/; Ei?%/p(Ei + Ep)tgto в месте контакта ролика с внутренней обоймой MpEiEp (го 4- Гг) hP (E2 + Ep)iS Фо (73) (74) Условие равной контактной прочности в местЗх соприкосновения ролика с обоймами т = т. Приравнивая правые части уравнения (73) и (74), получим г, = Eii2 (2 -Ь -р) tg Фо + R% (Го + (El + Ер) tg % Так как чаще всего нагруженные звенья МСХ с эксцентриковыми роликами выполняют из закаленной стали, когда .= £2 = = Ер - Е и Гх = = г, то и сравнения выражений (73) .и (74) следует, что т > т. Поэтому механизмы следует рассчитывать по контактному Напряжению т, величину которого найдем из формулы (74): т = 0,142 (75) Допустимый крутящий момент из расчета на контактную прочность При равной контактной прочности и равных модулях упруго- Rrlr tg Фо §2 tg Фо + (Го + Га) Rig%- сти П = Из последнего выражения в результате простых преобразований можно показать, что > г. Вот почему, кроме механизмов с равными радиусами рабочих поверхностей роликов, появились конструкции, у которых радиус рабочей поверхности роликов, контактирующей с внутренней обоймой, выполняют большим, чем радиус поверхности ролика со стороны наружной обоймы. У конструкций механизмов (см. рис. 4, о) с постоянным местом контакта роликов с наружной обоймой долговечность определяется поверхностной выносливостью материала роликов и наружной обоймы. Поэтому у таких механизмов при обеспечении контактной прочности в месте соприкосновения ролика и наружной обоймы необходимо повышать выносливость за счет увеличения г. Для указанных механизмов расчет на выносливость следует производить по контактному напряжению 142 l/Mi:=iil<rxl фо = arctg tg Фо) . (77) Максимальный момент в этом случае . 502/?Vp[T]tgfo E{R-r) (78) Расчет на жесткость. Если у МСХ с цилиндрическими роликами для снижения неравномерного распределения нагрузки между роликами и величины динамических усилий оправдано стремление к увеличению податливости механизмов, то у МСХ с эксцентриковыми роликами повышение податливости за счет упругих деформаций роликов и обойм во многих слуд1аях недопустимо. У .недостаточно жестких механизмов при воздействии на ,них больших крутящих моментов может произойти поворот эксцентриковых роликов в пространстве между обоймами, вследствие чего механизм выйдет из строя. Поэтому такие механизмы следует проектировать достаточно жесткими. Необходимая жесткость МСХ с эксцентриковыми роликами диктуется еще и тем обстоятельством, что с повьпыением деформации роликов и обойм увеличивается угол давления ф, обусловливающий пробуксовку механизма при заклинивании. Для нормальной работы механизма необходимо ограничить увеличение этого угла в допустимых пределах. Таким образом, расчетом на жесткость МСХ с эксцентриковыми роликами в отличие от механизмов с цилиндрическими роликами решают три задачи: обеспечение непроворота роликов между обоймами, определение угла давления ф и угла поворота обойм при нагружении. Основное условие при расчете на жесткость (см. рис. 7 в гл. 6) - условие непроворачиваемости роликов: U > -/-о + 1 + 2. (79) Величина Zg определится из треугольника ОАВ на основании теоремы косинусов: rl sin фо - Го cos Фо. Следовательно, неравенство (79) можно записать в виде 1 + 2 < п = Vr - rgsin фо + 2rosln~r. (80) Используя формулы (81) и (82) гл. 6 и определив интенсивность нагрузки в местах контакта ролика с обоймами по формул е (85) гл. 6, найдем 2 sm Фо (81) (82) Значения величин А, А, Ь, Ьг. i. в этих выражениях те же, что и в формулах (83) и (84) гл. 6. Максимальный крутящий момент Мтах из расчета на жесткость можно определить, если принять неравенство (80) как равенство и использовать выражения (81) и (82). В этом случае (83) nEzrlp sin Фо - л-2 sJn Фо + sin - -2 (1 - m) . ptp [ 1 Г 1 i 1 cin/seoM -4y(l-m)j-7Wj.-2f+s i-j. - ? \ 2 (1 - m -2m2) я j 1 -m2 Решая уравнение (83) графическим методом в узких интервалах (рис. 12), найдем величину Мщах- В качестве наибольшего значения Мр при графическом решении уравнения (83) следует выбрать величину Мшах> определенную по формуле (76) или (78). Величину угла давления ф с учетом деформации роликов и обойм найдем из уравнений (35): и (38): Ф = arcsin {R -4- x  2 (/? - /-1 -Ь ml) (гр -Ь /-2 - щ) (/? -Ь ui)2 + (гр ,)2 2 (/? + hi) {г, - щ) X . . . ->- (84) 2 (/? -/1 4-ul) (/-о-Ь/-2 - 2) Суммарная деформация Ui в месте соприкосновения ролика с наружной обоймой и контактная деформация и, в месте соприкосновения ролика с внутренней обоймой определятся из выражений (83) и (84) гл. 6, в которых величины Л, А, и D 2 имеют те же значения, а величины , 2л£г1рГо (/? - Tl) Sin фр , 2я£г/рго (/-р + /-2) siri фо 2--riTTila Резольвента системы уравнения (84), а также из уравнений (83) и (84) Рис. 12 гл. 6, как показали исследования, представляет уравнение 8-й степени. . Так как превалирующее значение при расчете на жесткость МСХ с эксцентриковыми роликами имеет объемная деформация Наружной обоймы, то, как правило, толщину этой обоймы принимают больше, чем у МСХ с цилиндрическими роликами. При конструировании необходимо стремиться выполнять обоймы постоянного сечения во избежание неодинаковой деформации обоймы в раз-322 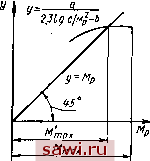 личных местах соприкосновения роликов. У МСХ с эксцентриковыми роликами достаточно из-за податливости обоим провернуться одцому ролику в пространстве между обоймами, и механизм немедленно потеряет работоспособность. РАСЧЕТ И КОНСТРУИРОВАНИЕ ПРИЖИМНЫХ УСТРОЙСТВ в большинстве случаев для нормальной работы МСХ в его конструкции предусматривается прижимное устройство, основное назначение которого состоит в том, чтобы обеспечить контакт заклинивающихся роликов с обеими обоймами. При этом достигается устранение мертвого хода в период заклинивания , т. е. обеспечивается постоянная готовность механизма к заклиниванию, и одновременное заклинивание всех роликов. Кроме того, прижимные устройства способствуют равномерному распределению нагрузки как между роликами, так и по длине каждого из них. При расклиниваний ролики под действием сил упругости с большим ускорением отбрасываются назади с значительной силой уда- * ряются об опорную поверхность прижимного устройства. Поэтому опорные поверхности прижимных устройств следует выполнять стальными с достаточной твердостью. Прижимные устройства, опорные поверхности которых изготовлены из металлов с малой твердостью (бронза, алюминие1вые сплавы, незакаленная сталь), расклёпываются и могут служить причиной неполадок механизма. Кроме того, следует помнить также, что мягкий прижим истирается, загрязняя металлическими частИцами смазку, тем самым увеличивая износ рабочих поверхностей основных деталей. Попадая на рабочие поверхности металлические включения резко повышают трение, что приводит к заеданию при расклинивании механизма. У МСХ импульсных передач на пружины прижимов при каждом расклинивании действуют динамические нагрузки. В этом случае пружина работает с переменным напряжением по пульсирующему циклу. Поэтому пружины следует рассчитывать на выносливость. Основным критерием правильного функционирования прижимного устройства любого МСХ является способность обеспечить контакт тел заклинивания с обоймами в первоначальной стадии периода заклинивания. Из этого основного критерия вытекает необходимость посредством прижимного усилия локализовать колебания роликов у механизмов со свободнымходом при больших скоростях и предотвратить отрыв роликов от обоймы при расклинивании. [13] в случае весьмамалого цикла движения механизма, когда контакт ролика с обоймами к началу заклинивания может запаздывать. К дополнительным условиям следует отнести вращение роликов у механизмов с цилиндрическими роликами. Все прижимные устройству роликовых механизмов свободного хода можно разделить на индивидуальные для каждого-ролика и Установим охранное оборудование. Тел. . Звоните! |