
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 где = m{R ~r) I (cos a - f sin a) eiy) - (sin cc + f cos cc) ] x x [0)2 (Y) 11; Уг = 0 [sin (a + y) + f cos (a + y)]; m (R - r) x x If [- 2 (y) P + 82 (y)}; г/2 = G (sin y - f cos y). 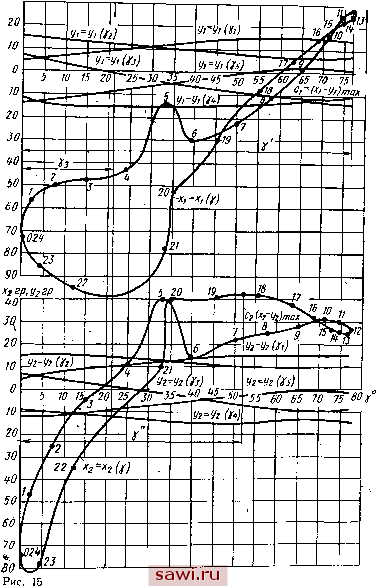 Определив предварительно законы ©2 = ©а (y) и 82 = 82 (y). строим зависимость Xi = (y) и ДС2 = 2 (y) (см. рис. 15). Так как МСХ имеет z роликов, то зависимости = у {у) и у - у, (у) в общем виде запишутся GJsin [y + ос + 1 ( - 1)] + f cos [y + ос +1 ( - 1)] j; = Gisin[y+( ~l)]-fcos [y+-( -!)]}, где n - порядковый номер ролика в механизме; По этим выражениям строим графики ух = у {у) я У2 = У2 (у), причем графики У1 = Vi (Yi) У2 = У2 (Yi) соответствуют первому ролику ( = 1); У1 = У1 (у2) У2 = У2 (Y2) - второму ролику ( = 2) и т. д. Из графиков (см. рис. 15) находим Ci = (jCi-i/i)max и С2 = = -У2)тах и соответственно углы y и y . а затем по формулам (93) и (94) при известном угле р определяем Р и Р . Сравнив полученные величины Ci и С2, будем иметь C2>Ci, что и определило неравенство РРР. Таким образом, для импульсного вариатора рассматриваемого типа расчет усилия прижима следует производить по величине Р , определение которой, очевидно, возможно без построения верхней части диаграммы на рис. 15. Механизмы с наружной звездочкой. Простое прижимное устройство в виде плоской консольной пружины 2, проходящей через , прорезь звездочки / и закрепленной одним концом в вертыше 5, показано на рис. 16, а. Прижимное устройство МСХ -fpnc. 16, б) имеет сквозное направляющее отверстие в звездочке. Пружина опирается на наклонную к оси отверстия внутренщою цилиндрическую поверхность штампованного кольца, напрессованного на звездочку. Такая опорная поверхность вызывает перекос пружины и прижимного плунжера, ослабляя усилие прижима. Этот недостаток устранен в прижимных устройствах (рис. 16, в, г), где в сквозные направляющие отверстия для опоры пружины установлены гладкие цилиндрические пробки из пластмассы (рис. 16, в) или ввернуты регулировочные винты (рис. 16, г). В последнем случае и имеется Возможность регулировать прижимное усилие. > Установкой индивиду ал ьны-х прижимных устройств в сепараторе, соединенном со звездочкой (рис. 16, д), достигается упрощение конструкции и ее технологичность. Оригинальная конструкция с радиально расположенными прижимными устройствами в двух вариантах с плунжерным и шариковым прижимом показана на рис. 16, е. Прижимное устройство с подпружиненной прижимной колодкой, соединенное шарнирно со звездочкой, показано на рис. 16, д. Прижимное усилие пружин!}! на ролик при вращении звездочки ослабевает благодаря действию центробежной рилы инерции Р 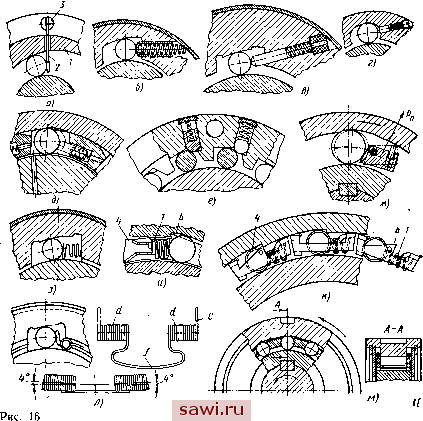 и при определенной угловой скорости звездочки может достигнуть нуля. На рис. 1.6, 3 показан прижим с плоской змеевидной пружиной, позволяющий упростить устройство звездочки (нет направляющих отверстий). Конструкция звездочки еще больше упрощается с применением змеевидных пружин, установленных в штампованные сепараторы (рис. 16, и, к), состоящие из двух колец 4 с выступами Ь, которые помещаются в вырезы звездочки, что предотвращает движение сепаратора относительно звездочки; Кольца сепараторов связаны между собой перемычками посредством точечной сварки, на которые опираются или закрепляются концы пружины /. Прижим в виде фигурной пружины небольших размеров, применяющийся у механизмов с числом роликов до 20, показан на рис. 16, /I. Фигурная пружина выполнена из круглой проволоки. Она состоит из двух навитых цилиндрических участков d и средней скобообразной прижимной части /. Цилиндрические участки входят в гнезда, выполненные в окнах звездочки, а пря- молинейные концы помещаются с двух сторон в торцовые ка-кавки. Сепараторные прижимные устройства в большей части аналогичны подобным устройствам МСХ с внутренней звездочкой. Типичная конструкция сепараторного устройства показана на рис. 16, м. Прижим сепараторов производится так же, как показано на рис. 14, в, г, д. Прижимные усилия рассчитывают аналогично расчету их для механизмов с внутренней звездочкой из условия контакта ролика, предварительно определив законы изменения угловой скорости ©2 = 2 (y) и углового ускорения 62 = 82 (y) звездочки в функции угла поворота у в период свободного хода. На основании формул (6) и (7) гл. 6 получим р, т (r + R) ((sin а 4-/2 cos а) [а {у)]+(cosa -sin а) jy)} (l+Zasin (p-a)-f (-/2)cos (р-а) G[sin (y- )-/acosfv - )] (1 + Ш sin Ф - a) -f (/3 - /2) cos (P - a) p m{R + r){e2 jy ) - /] [(02 (7O] -G (sin + /1 cos y )} ~~ (I-/1/3) Sin p + (/i + )cosp (95) (96) где y и у , как и для механизмов с внутренней звездочкой, углы поворота звездочки, соответствующие Р и Р ; R - радиус внутренней обоймы; fi, f2 и - коэ()фициенты трения на поверхностях соприкосновения ролика с внутренней обоймой, звездочкой и прижимом. Нетрудно определить углы расположения прижима р и Р , при которых Р и Р приобретают наименьшие значения: = (1 + Ш cos (р - ос) - (/з - h) sin:(p - ос) = О, откуда Р= 90° +0С -f Pa ар откуда Р = 90°-р1-Рз. = (1 -шсо5р-(/1 + ;з)51пР = 0. (97) 1 (98) Определение Р и Р для неустановившегося движения может быть выполнено тем же методом, что и для механизмов с внутренней звездочкой, с использованием уравнений (95) и (96). Механизмы с эксцентриковыми роликами. У данных механизмов, ролики в период свободного хода не вращаются и, следовательно, нет опасности износа элементе прижимного устройства. Поэтому отпадает необходимость в специальных прижимах, устанавли- 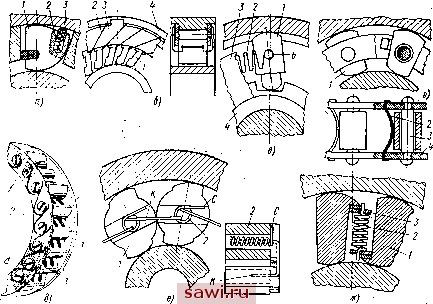 рис17 ваемых между роликами и прижимными пружинами. В большинстве случаев прижимные пружины непосредственно контактируют с роликами. У механизмов с эксцентриковыми роликами не требуется строгая координация окон сепараторов с положением роликов на контактных поверхностях обойм, как у МСХ с цилиндрическими роликами, что позйоляет выполнить сепараторы с меньшей точностью как для механизмов с индивидуальными, так и с групповыми прижимными устройствами. Прижимное устройство (рис. 17, а) МСХ выполнено подобно, как и у МСХ с цилиндрическими роликами. В отверстии ролика i установлена пружина 2, которая через штифт 3 опирается на рабочую поверхность наружной обоймы и стремится повернуть ролик между обоймами в сторону заклинивания, а следовательно, прижимает обе его рабочие поверхности к обоймам. Весьма простое прижимное устройство (рис. 17, б) многороликового МСХ Челябинского политехнического института выполнено из круглой проволоки. Пружина 2 П-образной формы продета через два отверстия в средней части эксцентрикового ролика / и свободными отогнутыми концами зацеплена за щеку- 3, соединенную с наружной обоймой 4. В механизмах с зубчатой внутренней обоймой 4 (рис. 17, в) прижим роликов осуществляется змеевидной плоской пружиной 2, установленной в окна щек 3 и опирающейся на цилиндрические выступы роликов /. 334 На рис. 17, г, д, е, ж показаны прижимные устройства, не связанные с обоймами, ролики которых могут перемещаться относительно любой из них, представляя плавающую систелу. У МСХ опытного образца автоматической импульсной трансмиссии мотоцикла ИЖ-Юпитер Ижевского машиностроительного завода (рис. 17, г) прижим роликов /, установленных с зазором на осях 3 клепаного сепаратора 4, осуществляется плоской дугообразной пружиной 2, концы которой закреплены в прямоуголь-, ных отверстиях щек сепаратора. Прижим посредством плоской спиралеобразной пружины 2 показан на рис. 17, 3, где в прорези цапф d роликов7, установленных в отверстиях сепаратора 3, закреплен внутренний конец пружины, а наружный конец опирается на выступающую часть расйорки / сепаратора или-смежную пружину. На рис. 17, е показан индивидуальный прижим без сепаратора, смонтированный внутри роликов. В средней части каждого ролика / в сквозное цилиндрическое отверстие закладывается навитый участок пружины 2. Один конец с пружины упирается в плоскость паза на торце ролика, другой - k пропускается внутри навитой части в обратную сторону и отгибается в отверстие навитого участка пру)кины соседнего ролика. В рассмотренных прижимных устройствах каждый ролик прижимается отдельной пружиной. На рис. 17, ж показано прижимное устройство, где посредством одной пружины 2, опирающейся через шайбы 3 на верхний выступ ролика / и на нижний выступ другого ролика, достигается прижим обоих роликов. В МСХ с. эксцентриковыми роликами в качестве прижимов наибольшее распространение получили спиральные браслетные (кольцевые) пружины, установленные в пазах торца ролика (см. рис. 4, а) или отверстиях по середине роликов (см. рис. 4, в). Чтобы прочно соединить концы таких пружин при навивке, один конец выполняется коническим,-- который ввинчивается при сборке МСХ в отверстие другого конца. Несмотря на простую конструкцию прижимных устройств с пружиной, их в силу ряда недостатков все чаще начинают заменять или использовать в комбинации с сепараторами и различными прижимами. К основным недостаткам прижима роликов браслетной пружиной следует отнести следующие: неравномер;ное давление на ролики из-за неодинаковой жесткости пружины по длине (в местах соединения жесткость больше) и различия мест контакта пружины с роликами; неравномерное давление роликов на рабочие поверхности обойм; вследствие действия радиального усилия ролики к внутренней обойме прижимаются с большим усилием; браслетная пружина не гарантирует равномерную расстановку роликов между обоймами; возможно образование суммарного зазора между любой парой роликов; с увеличением угловой скоррсти всей системы роликов действие центробежных сил массы пружины изменяет усилие прижима; Установим охранное оборудование. Тел. . Звоните! |