
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Конструктивные решения многоосных автомобилей 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 z,MM г-г м-2 i-H-i 1-2-1 2-2 1-1-2 Осевая формула
Рис. 21. Измеиеиие максимальных амплитуд колебаний в зависимости от компоновки при различной длине неровностей: /-Sh = 2 м; 2-Sh = 4 м; -12,6 м Н-Н 1-2-1 1,ог- 10 12 S ,M О Рнс. 22. Зависимость амплитуды колебаний в области резонанса и возмущающей функции от длины неровностей при различной их высоте: / н 2 -высота неровности соответственно 10 и 5 см; 3 - возмущающие функции функций, и на всем диапазоне длин неровностей эта пропорциональность остается примерно одинаковой. Таким образом, колебания подрессоренной части автомобиля зависят от амплитуд возмущающих функций, а они -от длины неровности, базы и размещения осей по базе. Следовательно, сравнение колебаний автомобиля с различными схемами компоновки можно проводить по возмущающим функциям. Анализ влияния различных схем на возмущения может быть распространен и на колебания. При проведении экспериментальных работ по определению плавности хода реальных автомобилей обычно амплитуду колебаний Z не фиксируют, так как это трудоемко и требует дополнительного оборудования, а определяют ускорения, возникающие в центре масс. Известно, что зависимость между ускорением и соответствующим перемещением выражается формулой Собственная частота колебаний Юг для каждого автомобиля является величиной постоянной, поэтому максимальные ускорения будут пропорциональны максимальным амплитудам перемещений в резонансном режиме на неровностях соответствующей длины, и характер протекания зависимости z в центре масс будет таким же, как г=/(5н, Sh/L). График зависимостей z=f{Ss) (рис. 23) для механических моделей автомобиля построен по результатам решения на АЭВМ и экспериментального измерения резонансных ускорений при установившемся движении по косинусоидальным гармоническим неровностям в сравнении с соответствующими возмущающими функциями. Как видно из графика, экспериментальные кривые 2=/(5н) почти полностью соответствуют кривой, полученной для расчетной схемы с помощью АЭВМ. Сравнение графика расчетной зависимости ф=/(5н), полученной на АЭВМ, и кривой, построенной по максимальным угловым перемещениям в области резонанса, возникающего на модели автомобиля при движении по неровностям различной длины, показало, что по сходимости расчетных и экспериментальных данных для вертикальных ускорений и угловых колебаний подрессоренной части автомобиля можно судить о правильности выбора расчетной схемы и набора характеристик подрессоривания. Оно также подтвердило возможность распространения оценки различных схем шасси по возмущающим функциям на вынужденные колебания в резонансном режиме. Выше рассмотрено по результатам расчета и эксперимента влияние компоновки ходовой части и числа осей на отдельные характеристики, определяющие вынужденные колебания, применительно к четырехосному автомобилю. Для проверки выводов и выяснения влияния схемы ходовой части на показатели плавности хода шестиосного шасси автомобильного крана было выполнено такое же решение дифференциальных уравнений с помощью АЭВМ. Решение проводилось на моделирующей установке МН-14. В качестве характеристик и параметров шасси и
2 и 6 8 S ,m 0 Рис. 23. Графики сравнения расчетных и экспериментальных данных (в режиме резонанса) с функцией возмущения: / - расчетные; 2 - экспериментальные; 3 - возмущающая функция системы подрессоривания были приняты характеристики механической модели шестиосиого шасси. В ходе решения задачи переменной являлась схема размещения осей по базе. Рассчитывались как схемы с симметричным расположением осей 3-3, 2-2-2, так и с равномерным 1-1- 1-1-1-1 при движении по дорогам с гармоническими неровностями (S =2, 5, 8, 9, 45 и 18,9 м; Я =70, 80 и 150 мм). Первые три неровности по длине и высоте соответствуют реальным неровностям, что дало возможность сравнивать результаты решения задачи на АЭВМ с экспериментальными данными; длины двух последних неровностей кратны базе модели. В процессе решения регистрировалось с помощью самописцев девять параметров, характеризующих колебания подрессоренной и неподрессоренных масс. Анализ результатов решения задачи на АЭВМ показал хорошую их сходимость с экспериментальными данными для схемы 3-3. Сравнение данных по вертикальным и угловым перемещениям подрессоренной массы всех трех вариантов расположения осей по базе показало, что перемещения зависят от амплитуд соответствующих возмущающих функций. Отношение амплитуд колебаний к амплитудам возмущающих функций для всех вариантов практически одинаково. Так, отношение максимума вертикальных перемещений к амплитуде возмущений, построенных в произвольном масштабе, для схемы 3-3 составило 22, для схемы 2-2-2 - 24 и для схемы 1-1-1-1-1-1 - 22. Отношения угловых перемещений и возмущений для различных схем соответственно равны 9,6; 10,0 и 9,6. Это положение подтвердило полученный вывод о возможности сравнения различных схем по их возмущающим функциям. На рис. 24 представлены зависимости амплитуд возмущающих функций от длины неровностей пути для трех вариантов шестиосиого автомобиля. Анализ графиков показывает, что не-  Рис. 24. График зависимости амплитуд возмущающих функций модели шестиосиого автомобиля с различными схемами размещения осей по базе от длины иеровиостей: / - схема 3-3; 2 -схема 2-2-2; 3 -схема 1-1-1-1-1-1 ровности различной длины по-разному воздействуют на шасси с данной схемой ходовой части. В зоне длин неровностей около 2 м наибольшая амплитуда вертикальных возмущений характерна для схемы с равномерным расположением осей; в интервале 3...4 м -для схемы 3-3, в интервале 4... 5 м -для схемы 2-2-2, в интервале 12... 20 м-для схемы 1-1-1-1-1-1. Распределение наибольших значений амплитуд угловых возмущений следующее: 2 ... 2,5 м -для схемы 1-1-1-1-1-1; 2,5 ... 4 м - для всех схем приблизительно одинаково; 4 ... 8 м - для схемы 2-2-2 и 8 ... 20 м - для схемы 3-3. Таким образом, для шестиосных автомобилей так же, как и для четырехосных, сделать какое-то заключение о преимуществе той или иной схемы расположения осей, учитывая равную вероятность появления различных длин неровностей в реальных условиях эксплуатации, невозможно. Следовательно, добиться существенного улучшения показателей плавности хода блатодаря изменению расположения осей по базе многоосных автомобилей практически нельзя. Эту задачу надо решать соответствующим подбором характеристик подрессоривания. При экспериментальной оценке параметров колебаний шестиосиого макета автомобиля вертикальные ускорения измеряли в кабине, в центре масс и в задней части, регистрировали угловые перемещения подрессоренной массы. Определялись величины вертикальных ускорений неподрессоренной массы четвертого правого колеса и ходов третьего правого и шестого левого колес. При испытаниях макет не имел амортизаторов в системе подрессоривания, давление воздуха в шинах - номинальное 300 кПа. Испытания проводились на следующих моделированных дорогах различного состояния, и вне дорог: бетонированное шоссе удовлетворительного состояния с периодическими неровностями, образованными стыками бетонных плит; крупнобулыжный участок дороги; местность - холмистое поле с хаотическими неровностями длиной 0,5-3 м и высотой до 30 см с явно выраженным криволинейным расположением волн; участки специальной дороги с косинусоидальными волнами длиной 2, 3, 4 и 5 м, высотой 70 мм и длиной 8 м, высотой 150 мм. Скорости движения при измерениях были постоянными, изменялись ступенями от минимальной 10 км/ч до максимально возможной по условиям безопасности движения. Анализ результатов измерений позволил установить, что при движении по бетонированному шоссе возникают небольшие вертикальные ускорения (до 0,55 g), а угловые колебания не превышают 30. При движении по крупнобулыжному участку наблюдается увеличение амплитуды угловых колебаний и одно- временный рост вертикальных ускорений до i,Bg на скорости около 37 км/ч, когда имеет место резонанс угловых колебаний, обусловленный воздействием стыков плиг основаняя дороги. При движении вне дорог ускорения в центре масс, в задней частя и в кабняе достигают соответственно 2g, 1,88 и IJg, угловые колебання доходят до 2 °. Колебания а данных условиях определяются воздействием единичных неровностей. Скорость при этом не превышала 26 км/ч. При движении на неровностях периодического характера имели место несколько характерных режимов движения. При движенни но участку с неровностями длиной 2 м на скорости около 38 км/ч возник характерный резонансный режим колебаний неподрессоренных масс, В этом режиме вертикальные ускорения неподрессоренных масс (колес) достигали (10,., 12) g, вследствие чего наблюдались почти полный пробой шин и отрыв колес от полотна дороги. Вертикальные ускорения подрессоренной массы не превышали в задней части g, в центре масс 1,4 g, в кабине 1,8 г, а угловые колебання были до 1°, Более высокие ускорения кабины по сравнению с ускорениями задней части и центра масс, очевидно, объясняются собственными вынужденными резонансными колебаниями кабины, Появление интенсивных резонайсных колебаний неподрессо-ренных масс и отдельных элементов подрессореияой массы (кабины) на коротких неровностях при сравйительно небольших колебаниях подрессоренной массы в центре масс и в задней части является характерной и опасиой особенностью многоосных автомобилей. С целью снижения уровня таких колебаний необходимо йа всех колесах ставить амортизаторы и рииимать меры для умейьшеиня неподрессоренных масс, а также вводить вторичное подрессориванне отдельных элементов автомобиля (кабины, груза и т. п.). Другим характерным режимом является режим движения на участке с неровностями длиной 5 м, В атом случае наблюдаются ннтеясивные колебання прн резонансе вертикальных колебаний, При скорости около 37 км/ч ускорения во всех точках достигали 2,3, угловые колебания - 2 °, При движении по дороге с волновыми неровностями ($ =8 м) имеет место один из максимумов возмущающей функции вертикальных колебаннй, IS. ОСОвЕННОСТИ КОЛЕБАНИЙ СОЧЛЕНЕННЫХ АВТОМОвИЛЕЙ Наличие шариирной связи между отдельными секциями автомобиля определяет особенности колебаний сочлененных автомобилей. Для установления этнх особенностей на основе аналн-Тйческого анализа необходимо иметь эквивалентную динамическую систему и ее математическую модель. Для упрощения аналитического анализа и выявления прииципиальных отличий колебаннй сочлененных автомобилей в качестве первого шага й основного допущения примем к исследованию плоскую расчетную схему. Для каждой конкретной конструктивной схемы сочлененного автомобиля можно разработать свою расчетную си* стему. Учитывая, что различные сочлененные автомобили принципиально отличаются только конструкцией шарнирного сочленения (см. гл. I), попытаемся для решения поставленной задачи использовать универсальную схему, позволяющую описать особенности конструкции всех известных сочлененных автомобнлей, при этом уравнення колебаний принимают лаконичный вид, удобный для аналитических исследований и моделирования на ЭВМ, В качестве такой расчетной схемы яспольэуем эквивалент* яую динамическую систему (рис, 25), Эта схема в представленном виде отображает сочлененный автомобиль седельного типа, который имеет две активные многоосные секции, соединенные между собой сцепным шарнирным устройством. Для анализа колебаний в продольной вертикальной плоскости принимают, что сцепка обеспечивает одну степень свободы н является одно-шарнирной, Кроме того, она имеет упругий элемент и гидроци-лнндр вертикального складывания (ЩВС), который в случав угловых перемещений одного звена относительно другого работает как амортизатор. Общая опорная балка, выполняющая функции грузовой платформы с грузом, имеет два шарнирных соединения, установленные вблизи центра масс каждого звена секций. Вез общей грузовой платформы схема будет эквивалентна сочлеиенно!йу автомобилю прицепного типа, а без сцепного устройства и ГЦВС - сочлененному автомобилю полупри- 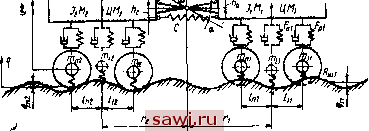 Рис. SS. Рве(1е¥вая схема иолебаний сочлененного многоосного aвtoмoвi(ля Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||