
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Конструктивные решения многоосных автомобилей 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 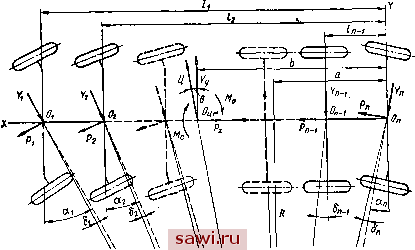 Рис. 57. Расчетная схема поворота многоосного автомобиля ДЛЯ решения практических задач малопригодны. Необходимо понизить порядок характеристического уравнения и упростить задачу. Существует ряд других методов решения и упрощения зада чи поворота многоосного автомобиля. Для достижения целей сравнительного анализа схем следует принять ряд допущений 13], так как они больше соответствуют условиям задачи. Общие уравнения поворота уточнить с целью получения возможности решения задачи динамического поворота. Общая расчетная схема сил, действующих на автомобиль с любым числом осей и с любой схемой поворота, показана на рис. 57. Все силы считаем действующими в горизонтальной плоскости и решаем плоскостную задачу; касательные силы на колесах принимаем приложенными к продольной оси. Расчет будем вести по углам поворота и углам увода осей, равным полусумме соответствующих углов поворота колес оси. Действие крена на поворот не учитываем. Из внешних сопротивлений прежде всего следует рассмотреть момент сопротивления повороту Мс. который можно выразить алгебраической суммой моментов, действующих на автомобиль при повороте: c=i;2M+2fp-{-f;, (67) 1 1 где Afm -момент сопротивления повороту шины (опоры); Мр - момент, возникающий от разности сил тяги на правых и левых колесах; Af/- инерционный момент, возникающий при неустановившемся повороте (при входе в поворот и выходе из поворота). При повороте автомобиля происходит сложное взаимодействие колеса с поверхностью дороги и с грунтом. К сожалению, это взаимодействие мало изучено, совершенно отсутствуют данные по взаимодействию колесной опоры многоопорного автомобиля. На колесо действуют реакции грунта, создающие сопротивление повороту автомобиля. Эти реакции имеют различную природу и зависят как от характеристик шины и режима движения, так и от состояния грунта. В плоскости контакта колеса с поверхностью дороги в общем случае действуют силы трения и силы деформации грунта, возникающие вследствие его среза и нагребования. Эти силы действуют как в продольной, так ив поперечной плоскостях. Продольные силы принято относить к силам сопротивления качению от деформаций грунта и шины. Силы в поперечной плоскости зависят главным образом от радиуса поворота и угловой скорости шины. Очевидно, при малых радиусах поворота и на деформируемых грунтах эти силы могут быть большими, а при больших радиусах и на твердой поверхности - малыми. Многое зависит от того, какое это колесо - управляемое или неуправляемое. Математически описать все явления, сопровождающие взаимодействие шин с грунтом при повороте, пока невозможно. Существует несколько приближенных методов расчета момента сопротивления колеса. Один из них [2] основывается на экспериментальном определении коэффициента сопротивления повороту Цп колеса данного автомобиля в данных условиях. В связи с тем, что большое число факторов влияет на этот коэффициент, точные значения его получить очень трудно и ставить задачу по накоплению таких данных нет смысла из-за большой приближенности этого метода. Более точные данные можно получить, рассчитывая момент сопротивления повороту шин через стабилизирующий момент [4 и 18]. На многоосных автомобилях приходится учитывать и второе слагаемое уравнения (67). На этих автомобилях для повышения проходимости, как правило, ставят или муфты свободного хода, или дифференциалы с определенным коэффициентом блокировки, в связи с чем при повороте силы тяги на левых и правых колесах оказываются неравными. Так, при наличии муфт свободного хода на колесах забегающей стороны сила тяги равна нулю, движение автомобиля происходит благодаря силе тяги на колесах отстающей стороны. Из-за этого возникает момент сопротивления повороту где Pjii, Pai - силы тяги на i-м левом и правом колесах; В - колея автомобиля. Этот момент зависит от соотношения сил тяги на колесах левого и правого бортов, поэтому может быть определено по их значениям. Таким образом, общий момент сопротивления повороту многоосных автомобилей даже при установившемся повороте значителен и пренебрегать им нельзя. Все прочие внешние силы, действующие на автомобиль, на схеме рис. 57 приведены к двум составляющим Рх и Ру. Они являются заданными силами. Приведение сил к осям координат учтем моментом приведения Мо. Сила Рх включает силу сопротивления воздуха, силу тяги на крюке, составляющую силы тяжести, продольную силу инерции, зависящую от изменения скорости поступательного движения, и другие продольные силы. Сила Ру может включать прежде всего проекцию боковой инерционной силы Ц на ось у, зависящую от скорости и радиуса поворота автомобиля, составляющую силы тяжести и другие внешние поперечные силы. Продольные и боковые реакции на колесах {Pi и У,) являются искомыми силами, зависящими от режима и условий поворота. Проведенный анализ действующих сил и моментов показывает, что задача по исследованию поворота автомобиля в общем виде много раз статически неопределима. Решение ее возможно при условии применения дополнительных уравнений упругости и геометрических связей, а также принятия дополнительных допущений и использования определенных приемов решения задачи. Используя рис. 57, получим общие уравнения криволинейного движения многоосного автомобиля с любым числом осей и любой схемой поворота: уравнения динамического равновесия 2 sin a,-f 2 JcosCi + P/.f f.-f Жо=0; 1 1 2 Cosa,-2 /sina,~P=0; (68) 2 P,sina,-f 2r,cosa,-f Я,=0, уравнение упругих связей по гипотезе увода колеса Приведенный коэффициент сопротивления уводу шины и грунта Ki в данной зависимости принят величиной постоянной, что верно для одного частного случая, когда движение осуществляется по твердой дороге и с малыми боковыми и тангенциальными силами на колесах. В общем случае эта зависимость нелинейна, аналитическое выражение ее неизвестно, так как коэффициент Кб зависит от многих факторов. Главными из них являются радиальная и тангенциальная силы на колесе, тип шины и давление в ней, состояние грунта, сцепление колеса с грунтом, скорость движения колеса и др. Учесть все это многообразие можно на основании экспериментальных и расчетных данных, которые должны дать для каждой шины семейство графических зависимостей, используемых при решении задачи [4]. Для упрощения задачи на первом этапе в исследованиях примем приближенную зависимость, что прл решении задачи сравнения различных схем рулевого управления не внесет существенной погрешности, если учитывать последующую экспериментальную проверку. Уравнение геометрических связей (см. рис. 57) Так как аг<25° (кроме опор, поворачивающихся на углы\до 90°), а бг<:10°, принимаем tg6, 6,; tgattg6 0, тогда 6i=ga;- -{h-a)/R. Из этих выражений получим формулы для радиуса поворота и смещения центра поворота: (69) ali-{tg ai-hi) R. Уравнения тангенциальных сил на колесах при блокированном приводе осей 5 лУир 121 Упр Pn-l = Pv In-Xl. Упр (70) где Реп суммарная сила внешних сопротивлений движению; Тпр - приведенная тангенциальная эластичность шин и грунта. Уравнения (70) получены на основании уравнений (52). Тангенциальные силы определяют в два этапа. На первом этапе их рассчитывают по зависимостям (70) с учетом значений кинематического несоответствия, определяемых по теоретическому радиусу поворота (см. гл. 4). Внешние силы сопротивления определяют с учетом момента сопротивления повороту колес по зависимости (67). На втором этапе, если действительный радиус поворота окажется значительно отличающимся от теоретического, проводят уточнение распределения сил тяги по осям. В случае неблокированного привода мостов автомобиля тангенциальные силы определяют по характеристикам механизмов, устанавливаемых между мостами (дифференциалов, муфт свободного хода и др.). В этом случае задача упрощается. Полученной системы уравнений достаточно для определения силовых и кинематических характеристик поворота. Уравнения действительны в пределах упругих деформаций шин и грунта. За пределами упругости начинается абсолютное скольжение шины. Как показали эксперименты, полное или частичное абсолютное скольжение шин отдельных колес многоосных автомобилей происходит практически на всех режимах поворота независимо от скорости и радиусов. Поэтому, когда требуются точные данные по повороту, необходимо проверять наличие абсолютного скольжения шин по условиям: для частичного скольжения у /j-f / < (0,5...0,6) (7,9 (по другим данным]/Я? + К? < (0,425...0,5)(7jcp); для полного скольжения -yf Я?-}-}/< Оср. При обнаружении полного скольжения отдельных колес расчет необходимо уточнять путем повторного решения задачи. 32. СРАВНЕНИЕ ХАРАКТЕРИСТИК ДИНАМИЧЕСКОЙ ПОВОРАЧИВАЕМОСТИ Для сравнительного анализа схем рулевого управления в качестве оценочных параметров примем изменение радиуса поворотаи смещение а центра поворота при заданных углах а поворота колес в зависимости от скорости. Эти два параметра характеризуют кинематические характеристики динамического поворота многоосного автомобиля и определяют ширину коридора маневрирования. Как уже указывалось, кинематические характеристики поворота могут быть получены для каждого конкретного автомобиля по общим уравнениям при задании условий поворота. Проведем анализ кинематических характеристик поворота для двух схем рулевого управления четырехосного автомобиля, совершающего поворот на ровной горизонтальной площадке. Сопротивлением воздуха пренебрегаем, коэффициент Kt, принимаем одинаковым на всех осях. На основании общих уравнений получим выражения для радиуса поворота и смещения центра поворота в динамике. . Для автомобиля с формулой управления 12-00 R=AiB, где Л=(/1 cos oi +1\ cos +ll) (cos Oi -f cos 03+2) - (/1 cos Oi -f -f/gCOS 02+ /3) (COS ai4-cos:a2-b2)-(/i cos i-f/2 cos Og-t- +/3)}; 5=[/i sin 0,-1-/2 sin а2+(Л si ai-fPaa sin a-M X (cosa,-f COS a2-f-2)- sin ai-f sin оЦ-(i sin Oi-fPsin Oj) X (/1 cosoi-j-Zcosaj-f/3); где i=/icosai-r/cos a-f 4-/? sin ai-b sin 2-r-~- (Pi sin Oj-f -fPj si 02) 254a:. Z;, = cosai-f cos.a2+2. Для автомобиля с формулой управления 1-00-4 где fi-(/cosoi-f/+/§)(cosoi + cos04+2)-(/1 cosа,+2тЬW 254A: -\b (cosOi-t-cos 04-1-2)-(/1 COSo-i+l-U)]; = ll sinoi-f -(Pl/lSinOi-Me) (COS Oi-f COS 04-f 2) - (/i COS oi-f/2+3) X (sin Oi -sin o) (Pisinoi -P4sina4)]; Установим охранное оборудование. Тел. . Звоните! |