
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Конструктивные решения многоосных автомобилей 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 где =(/, cos Cj -f --/3) - R [(sin Cj - sin 04) -f -(P sin ai - - Я4 sin 04) 254a:. Г i=cosai-j-cos 04-f 2. С целью получения сравнимых результатов схем управления 1-00-4 и 12-00 был проведен расчет кинематических характеристик поворота условных автомобилей по общим исходным данным: /, = L = 6 м; Кб=Ш кН/рад; Ga = 200 кН; b = L/2; привод колес полностью дифференциальный. Расчет проводился при равенстве максимальных углов поворота и равенстве радиусов поворота. Размещение осей по базе симметричное. Результаты расчета приведены на рис. 58. Анализ графиков подтверждает известный вывод о том, что схема управления с передними и задними управляемыми колесами 1-00-4 дает значительное уменьшение радиуса поворота или потребных углов поворота осей, в данном случае -почти в 2 раза. Это главное и важное преимущество схемы 1-00-4 над схемой 12-00. С изменением скорости у обеих схем в параболической зависимости изменяется смещение центра поворота. Несколько больше смещение для схемы 1-00-4. В соответствии с общей зависимостью (69) смещение центра а поворота связано с углами увода б осей, поэтому большее смещение должно дать большие углы увода. Радиус поворота для схемы 1-00-4 при увеличении скорости движения не изменяется. При схеме 12-00 радиус поворота с увеличением скорости незначительно возрастает. Выводы по оценке кинематических характеристик двух схем рулевого управления условного автомобиля подтверждены экспериментальными данными, полученными на механических моделях [2]. При проведении экспериментов отмечено, что для многоосных автомобилей характерно большое смещение центра поворота а, которое может быть переменным даже при одном и том же угле а поворота колес. Центр поворота как бы плавает вокруг какого-то среднего значения. Здесь большое значение имеет абсолютное полное и частичное ------попеременное скольжение отдельных шин, которое трудно учесть при расчетах. Рис. 58. Изменение радиуса и смещения центра поворота для двух схем рулевого управления четырехосного автомобиля в зависимости от скорости при равных углах поворота колес: --для осевой формулы 12-00; ----для осевой формулы 1-00-2
15 20 ,км/ч В связи с этим следует заметить, что представление об излишней и недостаточной поворачиваемости для многоосных автомобилей сугубо приближенно и относительно. При экспериментах выявляется только склонность той или иной схемы к соответствующей поворачиваемости. Большое влияние оказывает абсолютное (полное) скольжение, которое изменяет характер поворачиваемости, переменный для одного и того же автомобиля. Таким образом, схема рулевого управления 1-00-4 обладает решающими преимуществами по кинематическим характеристикам поворота. Это должно обеспечить в условиях эксплуатации преимущества по вписываемости в дорожную сеть и по маневренности на местности. Для оценки совершенства конструкции рулевого управления целесообразно учитывать и такие показатели, как число тяг и рычагов, промежуточных опор, шарниров, длину тяг и рычагов и их величины по отношению к базе автомобиля и числу управляемых осей. Анализ показал, что в этом случае преимущества имеет схема 12-00, рулевой привод получается проще, техническое обслуживание его менее трудоемко. Установлено, что привод, растянутый по всей длине автомобиля, требует особого ухода в зимних условиях. Застывание смазочных материалов и жидкости в шарнирах и трубопроводах может лишить автомобиль управления, особенно при движении на затяжных прямолинейных участках дороги. Кроме того, такой привод имеет малую жесткость. 33. ОЦЕНКА ВЛИЯНИЯ СХЕМ РУЛЕВОГО УПРАВЛЕНИЯ НА УСТОЙЧИВОСТЬ ДВИЖЕНИЯ Оценка устойчивости автомобиля имеет исключительно большое значение. Это эксплуатационное свойство обеспечивает безопасность движения и связанную с ней сохранность людей и груза. Важность этой проблемы для многоосных автомобилей onpej деляется большими габаритами перевозимого груза, который может иметь значительную высоту расположения центра масс над поверхностью дороги (например, крановое оборудование). Если для двухосных автомобилей проблема устойчивости актуальна в связи с высокими скоростями движения, то для многоосных автомобилей ее значение определяется скоростью, положением центра масс груза и многоопорностью ходовой части. Решить очень сложную задачу оценки схем рулевых управлений по критериям устойчивости в настоящее время стало возможным благодаря созданию проф. Д. А. Антоновым теории устойчивости движения многоосных автомобилей [4 и 5]. В этой теории под устойчивостью движения автомобиля понимается свойство конструкции автомобиля сохранять заданные дифференциальные параметры управляемого, но некорректируемого движения после прекращения действия возмущающих сил. Мно- гоосный автомобиль рассматривается с произвольным числом осей, с произвольным размещением осей по базе и с произвольной схемой рулевого управления. Учитываются особенности принятой схемы трансмиссии. Таким образом, теория устойчивости базируется на рассмотрении всех общих конструктивных решений. Важной особенностью теории устойчивости является ее базирование на теорию нелинейного увода колеса проф. Д. А. Антонова. При учете нелинейностей могут быть выявлены закономерности движения многоосного автомобиля с точки зрения устойчивости. При сравнительно небольших допущениях в теории предпринята попытка учесть основные физические явления и конструктивные особенности многоосных автомобилей, определяющие устойчивость их движения. Движение рассматривается относительно поступательной и угловой скорости как в установившемся, так и в неустановившемся режимах. В качестве критерия оценки предложены зависимости критической скорости Ukp движения - скорости, при которой теряется устойчивое движение в сформулированном выше понимании. Предложены выражения критической скорости разной сложности в зависимости от условий решаемой задачи. При рассмотрении различных схем рулевого управления использованы следующие выражения критической скорости: для установившегося прямолинейного движения при равенстве характеристик колес автомобиля  (71) для криволинейного движения при слабовыраженной нелинейности характеристик шин 2 cos а; 2 вг* cos ai qilik cos О;. (72) В этих выражениях: k - экстремальный коэффициент бокового увода, кН/рад; -расстояние по продольной оси автомобиля от центра масс до t-й оси, м; qt - обшая функция коррекции увода из-за нелинейной связи между боковой силой и углом увода t-й оси (колеса). Попытка использования формул типа (71) и (72) для подсчета критической скорости кр для более сложных режимов движения оказалась неудачной, так как представляет определенные трудности расчетное определение значений коэффициентов коррекции увода эластичных шин из-за необходимости учета различных факторов, влияющих .на увод, многие из которых к тому же взаимозависимы. При вычислении коэффициентов коррекции увода требуется повышенная точность, при несоблюдении которой нельзя выявить уровень влияния различных конструктивных параметров на величину критической скорости движения. Многие коэффициенты коррекции увода подсчитывают по эмпирическим формулам, достоверность которых требует проверки. Приведенные исследования четырехосных автомобилей с различными схемами рулевого управления подтвердили существующие оценки различных схем расположения осей по базе и рулевого управления [4] (рис. 59). Наибольшая устойчивость движения при всех прочих равных условиях свойственна как при прямолинейном, так и при криволинейном движении схеме, в которой управляемыми являются только колеса передних осей при тележечной схеме расстановки осей по базе (на рис. 59 t=0,I25). Автомобили, имеющие управляемые передние и задние оси при сближенных центральных осях, обладают наихудшей устойчивостью движения. Критическая скорость этих автомобилей снижается на 30 % (рис. 59) и может лежать в пределах эксплуатационных скоростей движения. На величину критической скорости влияют различные конструктивные факторы и условия движения [4, 5]. Установлено, что практически все параметры автомобиля через частные функции и коэффициенты коррекции q [см. зависимости (71) и (72)] влияют на устойчивость движения. Это влияние тесно связано с геометрическими размерами автомобиля, положением центра масс, характеристиками шин, числом осей, размещением осей по базе (см. рис. 59), принятой схемой рулевого управления и др. Для установления физической сущности и объяснения причин появления определенных свойств различных схем рулевого управления полезно провести анализ изменения боковых сил на колесах в различных условиях движения. Известно, что в теории устойчивости двухосных автомобилей в качестве оценочного параметра принимают значения удельных боковых сил, вызывающих занос автомобиля и представляющих собой отношение боковой силы, действую- 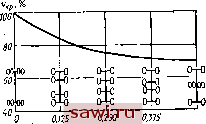 0,500!, Рис. 59. Зависимость критической скорости от коэффициента размещения осей по базе (по данным Д. А. Антонова) щей на заднюю ось при начале заноса, к силе тяжести, приходящейся на эту ось. Более устойчив автомобиль, занос которого вызывается большими удельными боковыми ситами. Оценка устойчивости автомобиля против заноса по боковой силе, действующей на заднюю ось, выбрана не случайно. Теоретически доказано, что начало заноса задней оси автомобиля опасно, так как начавшееся ее скольжение прогрессирует и в последующем приводит к потере устойчивости движения. При скольжении передней оси этого не происходит. Скольжение одной задней оси многоосного автомобиля еше не означает потерю устойчивости его движения. Такое скольжение происходит при эксплуатации часто на многих режимах движения, однако потери устойчивости не наблюдается. Устойчивость многоосный автомобиль теряет тогда, когда начинается скольжение группы задних осей. Исходя из этого, по аналогии с двухосными, судить об устойчивости многоосных автомобилей против заноса можно по суммарной удельной боковой силе, приходящейся на оси, расположенные в задней от геометрического центра части автомобиля, вызывающей занос автомобиля. При рассмотрении четырехосного автомобиля суммировать следует удельные боковые силы, действующие на третью и четвертую оси, шестиосного шасси - силы, действующие на четвертую, пятую и шестую оси и т. д. Чем больше силы, которые могут вызывать занос, тем устойчивее должен быть автомобиль. Однако, как показали исследования, этого параметра для оценки устойчивости против заноса для многоосных автомобилей недостаточно. В условиях эксплуатации у одних автомобилей удельные боковые силы могут возникать часто, а у других они не возникают или недостаточны, чтобы вызвать занос. На удельные боковые силы, вызывающие занос, важное влияние оказывает схема рулевого управления и схема размещения осей по базе. В связи с этим целесообразно в качестве оценочного параметра принять сумму удельных боковых сил, действующих на группу задних по отношению к геометрическому центру осей в реальных условиях эксплуатации, и соотношение сумм удельных боковых сил, действующих на задние и передние оси в тех же условиях. Для сравнительного анализа двух схем рулевого управления с точки зрения их влияния на устойчивость против заноса, очевидно, следует рассмотреть параметры, связанные со схемой, а все прочие параметры, влияющие на занос, считать постоянными. К числу первых параметров относятся боковые силы и их распределение по осям при криволинейном движении. Боковую силу на оси будем оценивать углом увода б и коэффициентом сопротивления уводу /С . Последний параметр, поскольку приводится сравнительный анализ, считаем не зависящим от схемы рулевого управления и размещения осей по базе. Таким образом, оценку схем можно свести к оценке величин углов увода б на осях и к их распределению между осями. Очевидно, автомобиль с большим суммарным значением углов увода на группе задних осей при всех прочих равных условиях будет менее устойчив против заноса. Превышение суммы углов увода задних осей над суммой углов увода передних осей указывает на большую склонность автомобиля к заносу по сравнению с автомобилем, имеющим меньшее соотношение суммарных значений углов увода. Для оценки различных автомобилей проведем сравнительный расчет соотношения углов увода для условного четырехосного автомобиля с двумя различными схемами управления и размещения осей по базе по исходным данным, принятым выше, по общим уравнениям поворота (68) -(70). Результаты расчета приведены на рис. 60. Углы увода осей автомобиля со схемой 1-00-4 и разброс их значений для разных осей значительны. У автомобиля со схемой 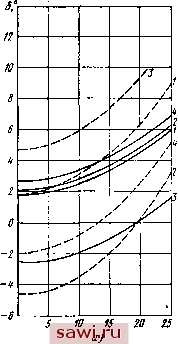
15 ZOv,m/v Рис. 60. Измеиеиие углов увода осей автомобиля с различными схемами рулевого управления при равных углах поворота осей в зависимости от скорости: - - для схемы 12-00; а -для каждой оси (1...4); б -для группы осей (2, j н 2з): - - - - дли схемы 1-00-4 Установим охранное оборудование. Тел. . Звоните! |