
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Конструктивные решения многоосных автомобилей 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 тока и безопасности движения на высоких скоростях. С каждым годом в крупных городах все меньше остается свободного пространства, приходящегося на один автомобиль. Теория криволинейного движения, рассмотренная выше, показывает, что главной, определяющей причиной низкой устойчивости автомобилей со всеми управляемыми колесами является активная роль задних управляемых осей в формировании поворачивающего момента. Поэтому, если исключить или уменьшить эту активность задних колес, сделать их пассивными, то движение автомобиля будет устойчивым на всех режимах поворота. Проф. Д. А. Антонов предложил называть передние колеса управляемыми, а задние - поворотными, как не создающими активного поворачивающего момента и только уменьшающими момент сопротивления повороту. Исходя из этих посылок теории, проводились разработки конструктивных решений привода поворотом задних колес. Как показано выше, для исключения изменения знака угла увода на управляемых колесах задней оси с отрицательного на положительный в самом начале поворота, одной из важнейших причин потери устойчивости, предложен специальный привод управления этими колесами [4]. Привод задних колес должен обеспечить запаздывание в повороте по сравнению с передними колесами на 0,1 рад (примерно 5 ... 6°) и иметь специальное стабилизирующее устройство, автоматически возвращающее задние колеса в положение, соответствующее прямолинейному движению. Изменение углов поворота управляемых колес должно происходить в соответствии с зависимостями, приведенными на рис. 62. Прямая / показывает изменение угла поворота передних управляемых колес. Эта прямая представляет биссектрису координатного угла. Угол поворота задних колес должен изменяться по прямой , исходящей не из начала координат, а из точки абсциссы ai=0,l, т. е. при ai=0,l рад аз=0. 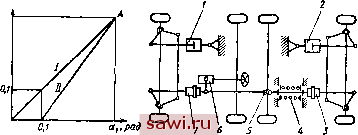 Рис. 62. Зависимости изменения углов поворота колес передней и задней осей J и схема привода, обеспечивающая выполнение этих зависимостей Важно подчеркнуть, что закон изменения углов поворота передних и задних колес должен главным образом обеспечить запаздывание, а не простое отставание поворота задних колес (одновременный поворот с меньшей скоростью), Отставание никакого эффекта на повышение устойчивости не дает и такое мероприятие вредно. Закон изменения углов поворота колес должен обеспечить выполнение главного принципа управления: поворот задних колес должен начинаться только, когда автомобиль войдет в поворот и на задних, еще не повернутых колесах возникнет боковая сила в контакте, направленная в сторону мгновенного центра поворота. Скорость нарастания угла поворота задних колес должна быть выше скорости передних колес для обеспечения совпадения максимальных углов поворота в одной точке Л. Это необходимо для обеспечения кинематики поворота без абсолютного скольжения колес и обеспечения заданного минимального радиуса поворота. В пределах угла поворота передних колес до 0,1 рад задние колеса должны находиться в нейтральном положении и удерживаться надежно в этом положении специальным стабилизатором. В этом режиме автомобиль имеет только передние управляемые колеса со всеми положительными свойствами по устойчивости движения. Для обеспечения реализации закона поворота колес предложена кинематическая схема рулевого управления, показанная на рис. 62 [5]. Водитель, воздействуя на рулевое колесо, через рулевой механизм 6 управляет гидроклапаном 7, который управляет потоком жидкости гидроцилиндра I. Гидроцилиндр / приводит в движение рулевые тяги, в результате поворачиваются колеса передней управляемой оси. Задние колеса управляются гидроцилиндром 2, давление жидкости к которому регулируется золотником 5, связанным с рулевым механизмом через проушину 5 и пружину стабилизатора 4. В пределах угла поворота передних колес 0,1 рад проушина 5 обеспечивает свободный ход тяги. Пружина 4 держит задние колеса в нейтральном положении и не позволяет включать золотник 5 на поворот задних колес. После того, как холостой ход проушины 5 будет ликвидирован, включаются в поворот задние колеса. Конструкцией золотника 3 предусмотрено самопроизвольное его включение при случайном повороте задних колес. В Японии на опытных образцах легковых автомобилей со всеми управляемыми колесами проведены исследования с применением электронных устройств автоматической системы управления задними колесами. Автомат работает в зависимости от скорости движения и во взаимосвязи с поворотом передних колес. Вероятно, система обеспечивает такой закон поворота колес задних осей, который исключает образование на них активного поворачивающего момента на больших скоростях и таким образом 7-704 193 обеспечивается устойчивость движения. Подробного описания автоматической системы управления колесами автомобиля с использованием микроэвм в печати пока нет. Однако можно установить, что в основе различных систем управления поворотом всех колес лежит один принцип: при большой скорости движения (более 35 км/ч) задние колеса поворачиваются на небольшой (не более 1,5°) угол в ту же сторону, что и передние, а при малой скорости (паркование автомобиля) - в сторону, противоположную повороту передних колес. Угол поворота задних колес в последнем случае значительно больше. Автомобиль, оборудованный такой системой, может безопасно поворачивать даже при скорости 145 км/ч. Определить, какое направление конструирования привода поворота колес задней управляемой оси является перспективным, можно в результате проведения сравнительных исследований. Пока можно отметить, что первые два мероприятия (введение запаздывания и блокировка привода управления задними колесами) могут при всех прочих условиях вызвать повышенный износ шин передних колес. Японская система обладает недостатками, определяемыми сложностью, малой надежностью и большой стоимостью. 34. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ПОВОРАЧИВАЕМОСТИ И УСТОЙЧИВОСТИ ДВИЖЕНИЯ Как отмечалось, проведение аналитических исследований управляемости и устойчивости многоосных автомобилей даже с применением ЭВМ без больших допущений ввиду сложности явлений невозможно. Кроме того, в настоящее время отсутствуют надежные данные и методы определения упругих характеристик шин, необходимые для исследований с помощью ЭВМ. Все это предопределяет приближенность расчетных данных. Для выявления реальной картины происходящих процессов необходимо проведение экспериментальных исследований на натуре или на механических моделях. При решении проблемы экспериментальным исследованиям было уделено большое внимание при оценке как характеристик управляемости, так и устойчивости автомобилей. Целью экспериментального исследования сравнительной динамической устойчивости при криволинейном движении четырехосных автомобилей было определение влияния неустановившихся процессов, отдельных конструктивных особенностей автомобилей и динамических характеристик устойчивости испытуемых моделей. Одновременно стояла задача проверки правильности полученных выводов аналитической оценки схем автомобилей по устойчивости и поворачиваемости. Были подготовлены два типа четырехосных смоделированных автомобилей, имеющих различные схемы размещения осей по ба- зе и рулевого управления и приблизительно одинаковые остальные характеристики. Данные исследуемых макетов приведены ниже. Колесная формула............ Осевая формула................ Формула управления.............. База L, мм.................. Колея 5, мм................. Относительная высота центра масс h=H/B . . . Угол поперечной статической устойчивости ф . . Максимальный относительный угол крена подрессоренной части Оо................ Нагрузка по сторонам и иа оси в статике .... Привод мостов и колес.............
блокировкой Как видно, соотношение величин, характеризующих статическую устойчивость автомобилей и конструктивные особенности, кроме схем, практически одинаковы. Опытные автомобили были смоделированы на узлах и агрегатах автомобиля Татра Т-813 (см. гл. 1). Была предусмотрена возможность изменения продольного положения центра масс груза в обе стороны от центра симметрии на 400 мм, что использовалось для экспериментальной оценки влияния положения центра масс на устойчивость. Испытания проводились на специальной бетонной площадке, которая имела разметку траекторий движения автомобиля. Траектории включали прямолинейные и криволинейные участки в виде окружностей, касательных к прямолинейным. Радиус окружности был принят 25 м и подобран на основании пробных заездов. Для многоосных автомобилей меньшие радиусы не пригодны по условию невписываемости автомобилей в траекторию, а большие радиусы требуют больших скоростей, что усиливает опасность проведения эксперимента. На прямолинейном участке длиной 250... 300 м проводился разгон автомобилей до установленной начальной скорости входа в поворот. На начальном участке длиной 50 м скорость поддерживалась постоянной. При движении водитель направлял левое переднее колесо по размеченной траектории, обеспечивая постоянство заданной скорости. Скорость изменялась ступенями от 25 км/ч до потери автомобилем устойчивости или управляемости. Ширина полосы движения была 3,5 м и соответствовала Ширине полосы движения на дорогах категорий I ... III [2]. Макеты были оборудованы приборами и приспособлениями Для замера скорости движения, бокового ускорения в центре Масс и над передней и задней осями, момента отрыва колес от дороги, момента начала заноса задней части макета, отметчиком траектории движения центра передней и задней осей, угла крена подрессоренной части и специальным страховочным устройством, представляющим собой дополнительную внешнюю опору. Опора была установлена на забегающую сторону в плоскости центра масс. Масса страховочного устройства включалась в общую массу автомобиля и уравновешивалась смещением груза в противоположную сторону. При экспериментах проводилась киносъемка, отдельные моменты фиксировались рапидной съемкой. Результаты эксперимента оценивались двумя показателями: скоростью входа в поворот, при которой на определенном этапе происходила потеря устойчивости или управляемости, и боковым ускорением в центре масс при потере устойчивости. Основные результаты исследований приведены в табл. И, куда включены средние данные по 14. Обобщенные результаты эксперимента по оценке устойчивости двух макетов автомобилей Особенность опыта
= а ш к X а, Е-ш о Ч U о- с о л о в о- Характер потери устойчивости
Начало скольжения задних осей Занос и разворот вокруг передней оси с отрывом колес на выходе из поворота То же, но без отрыва колес Потеря управляемости Выход из полосы движения при входе в поворот и занос Опрокидывание Потеря управляемости, выход из полосы движения Опыт без отилонеяяя от характеристик макетов, указанный выше. нескольким заездам. Скорость указана в границах, в которых наблюдалась потеря устойчивости. Экспериментальное исследование показало, что характер потери устойчивости двух макетов, отличающихся конструктивными схемами, при криволинейном движении по заданной траектории совершенно различен. Макет № 1 теряет устойчивость из-за появления заноса на круговой траектории, усиливающегося при выходе из поворота и с увеличением скорости. Начало заноса отмечается при скоростях 30... 35 км/ч, а на скоростях 35... 45 км/ч занос заканчивается разворотом автомобиля вокруг передней оси с возможным в последующем отрывом колес одной стороны от дороги. Полное опрокидывание наблюдалось при скоростях 45 ... 50 км/ч после интенсивного заноса. Блокирование подвески средних колес качественно поведения автомобиля не меняет и повышает устойчивость от опрокидывания (почти в 2 раза) благодаря уменьшению крена подрессоренной части. Сравнительные испытания макета с блокировкой дифференциалов показали, что общий характер поведения автомобиля не меняется-он также теряет устойчивость от заноса задней части. У макета с блокировкой дифференциалов привода мостов начальные скорости заноса уменьшаются. Усиление заноса и разворот автомобиля при выходе из поворота можно объяснить влиянием неустановившегося процесса, рассмотренного выше. При наличии рулевого привода на задние колеса испытывав-шегося макета возникают поперечные колебания автомобиля в горизонтальной плоскости. Кроме того, всякий резкий поворот рулевого колеса в сторону нейтрального положения увеличивает боковые реакции на задних колесах. В некоторых случаях это вызывает возрастание суммарной боковой силы, действующей на автомобиль. Такое возрастание может достигать 20...30% и по времени длится около 1 с. Объясняется это явление изменением траектории движения задней оси в переходном процессе и появлением дополнительных сил инерции, совпадающих по направлению с силами инерции, возникающими на участке траектории постоянной кривизны (см. разд. 33). Подтверждение этого положения может быть проиллюстрировано результатами расшифровки осциллограммы эксперимента (рис. 63). Следует отметить, что потеря устойчивости макета № 1 наступает при реально возможных в эксплуатации условиях и режимах движе- W,M/c -2fi
7*-704 Рис. 63. График изменения поперечных ускорений в центре масс 117ц и на задней оси Ws.o при выходе из поворота и ап Установим охранное оборудование. Тел. . Звоните! | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||