
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Конструктивные решения многоосных автомобилей 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 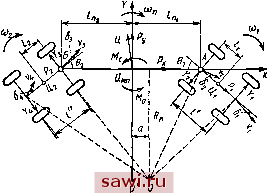 Рис. 68. Расчетная схема поворота сочлененного автомобиля особенности свойств сочлененных и многоопорных многоосных автомобилей. Сочлененные автомобили. Используя допущения и методику анализа, принятые в подразд. 31, составим расчетную схему и уравнения криволинейного движения сочлененного автомобиля. Для получения наиболее общих зависимостей в качестве исходной схемы примем схему поворота сочлененного автомобиля полуприцепного типа (рис. 68). Как видно, схема состоит из двух двухосных секций, соединенных грузовой платформой с управляемыми шарнирами А и Б. На схеме положение шарниров совпадает с центрами осей, что принято для упрощения расчетов геометрических связей. Их положение определяется координатами /пь /п2, U и /г, показывающими расстояния от центра симметрии платформы и звеньев до шарниров. Подвижную систему координат Х и У свяжем с платформой. Как и в подразд. 31, все внешние силы, действующие на автомобиль с учетом сил инерции, будем считать заданными и заменим их обобщенными силами Рх я Ру и моментом приведения ЛГо. Неизвестными силами будем считать силы тяги и Рг и боковые силы на осях У,-. Момент сопротивления повороту Мс равен сумме моментов сопротивления повороту секций. На основании рис. 68 и принятых допущений (см. разд. 31) получим систему общих уравнений, описывающих криволинейное движение сочлененного автомобиля полуприцепного типа: уравнения динамического равновесия Л?с+Ло + 1 sin sin 61 2-УI (4i cos 6i + 2/i)-f + cos 61 - Гз/ 2 cos + Г4 (/ 2 cos 62 + 21) = 0; + Pi cos 61 + Я2 cos 62+r 1 sin 61 - K2 sin 61 - -Kgsin e2 + r4Sin 92=0; Pj, -PiSin ej + Pj sinOa + ri cos 61 - - У 2 cos 01 -f K3 cos 02 - Г4 cos 62=0; уравнения упругих связей УI - f< Pi - о.бРеп- x2i/2Ynp; P2==0,5P, -fx2i/2Y p. При дифференциальной связи секций Pi=P2=Pcn/2 (обозначения см. поразд. 31) уравнения геометрических связей (координаты мгновенного центра поворота) п1 + п2 tgfil+tg 62-62-63 Ra COS 82 COS (в; - B2) COS (62 - 63) где Rn - радиус поворота центра масс платформы; Ri и Р2 - радиусы поворота секций. По данной приведенной выше системе уравнений можно решать любые задачи криволинейного движения сочлененных автомобилей. Эти уравнения могут быть использованы и для решения задач применительно к сочлененному автомобилю с одним управляемым шарниром, когда 02 = 0, и для сочлененного автомобиля прицепного типа, у которого отсутствует платформа, поэтому величины, с ней связанные, приравнивают нулю, т. е. 02 = 0, /п2 = 0, а 9i=70 и lni¥=0 становятся характеристиками шарнирной связи сочлененного автомобиля прицепного типа. Сравнение общих уравнений криволинейного движения многоосного автомобиля с жесткой рамой [(68).. .(70)] с полученной выше системой уравнений сочлененного автомобиля позволяет отметить их общность и однородность по составу постоянных и переменных величин. Эта общность уравнений дает основание полагать, что закономерности изменения характеристик поворотливости, поворачиваемости, управляемости и устойчивости сочлененных автомобилей будут такие же, как и у автомобилей с жесткой рамой. Разница только в том, что у сочлененных автомобилей в качестве задающих параметров выступают не углы поворота колес, а углы складывания секций. Из-за отсутствия управляемых колес моменты сопротивления повороту секций с тем же числом осей будут больше, чем у автомобиля с жесткой рамой. Для подтверждения отмечаемой общности на рис. 69 для примера приведен расчетный график изменения радиуса поворота в зависимости от углов поворота (складывания) при статическом повороте четырехосных автомобилей трех различных схем, имеющих практическое применение в настоящее время. График показывает одинаковый характер изменения радиуса поворота у всех автомобилей. Ограниченность максимального  Рис. 69. Изменение минимального радиуса поворота жесткорамного и сочлененного четырехосного автомобилей в зависимости от угла поворота (складывания) управляемых колес: /из - обычный автомобиль, формулы управления соответственно 12-00 и 12-34; 2 - сочлененный автомобиль угла поворота управляемых колес у жесткорамных автомобилей (точка[ А) не позволяет получить предельных минимальных радиусов поворота, преимущество сочлененной схемы неоспоримо. Теоретически и практически наиболее эффективной по характеристикам поворачиваемости является схема сочлененного автомобиля (при всех прочих равных условиях) со всеми управляемыми колесами и системой складывания секций. Она может обеспечивать наименьшие радиусы поворота, однако такая схема очень сложна в конструктивном исполнении. По характеру изменения всех прочих переменных величии, определяющих прохождение поворота, сочлененный ав- томобиль можно сравнить с многоосным авто.мобилем с передними и задними управляемыми колесами. Ему свойственны все преимущества и недостатки последнего. Применение системы поворота складыванием улучшает показатели поворачиваемости сочлененных автомобилей в различных условиях и на всех режимах движения. Сочлененные автомобили могут иметь хорошие вписываемость и маневренность в стесненных условиях, эти показатели могут быть даже выше, чем у автомобиля со всеми управляемыми колесами. Однако для сочлененного автомобиля, особенно для автомобиля прицепного типа, характерна недостаточная устойчивость прямолинейного и криволинейного движения по тем же причинам, которые были рассмотрены выше для жесткорамного автомобиля с задними управляемыми колесами. Недостаточная устойчивость движения сочлененных автомобилей отмечается в технической литературе и подтверждается практикой их эксплуатации, однако физические процессы этих явлений, количественные показатели, характеризующие неустойчивость движения, изучены недостаточно. В какой-то мере можно понять и установить факторы, определяющие неустойчивое движение, если рассмотреть неустановившийся поворот сочлененного автомобиля по методике, приведенной в разд. 33. Основываясь на этом, можно предположить, что у сочленен- ного автомобиля при входе в поворот на задней секции, как и у обычного автомобиля на задней группе задних управляемых колес, возникает переменная по направлению и значению боковая сила. При выходе из поворота боковая сила в начальный момент на задней секции будет значительно больше по сравнению с установившимся поворотом. Эта особенность и определяет неустойчивость прямолинейного движения. На задней секции всегда действует в контакте шин с дорогой знакопеременная боковая сила, которая возбуждает поперечные колебания задней секции вокруг шарнира. Для ликвидации этой неустойчивости движения необходимо принимать специальные меры. Очевидно, что рассмотренные выше методы повышения устойчивости движения жесткорамных автомобилей с задними управляемыми колесами путем введения системы их блокировки или запаздывания поворота по отношению передних колес для сочлененных автомобилей совсем не пригодны, так как блокировка полностью, а запаздывание частично лишают автомобиль поворачиваемости. В технической литературе предлагаются методы решения этой проблемы подбором соотношения масс звеньев и расстояния от центра масс до оси поворота. Ясно, что при этом причины возникновения колебаний не устраняются, только изменяется собственная частота колебаний и систему можно вывести из эксплуатационных резонансных режимов. В условиях эксплуатации соотношение масс звеньев автомобиля- величина переменная, она зависит от степени загруженности секции грузовой платформы. Кроме того, при компоновке автомобиля в процессе проектирования исходить из необходимости изменения частоты поперечных колебаний вряд ли целесообразно. Для обеспечения устойчивости движения на некоторых высокоскоростных сочлененных автомобилях в дополнение к системе управления складыванием применяют одну-две передние управляемые оси. При движении с высокими скоростями система управления складыванием блокируется и этим обеспечивается высокая курсовая устойчивость движения автомобиля. Ясно, что при таком конструктивном решении значительно усложняется конструкция автомобиля. Поэтому оно не получило широкого практического распространения. Вероятно, усилия исследователей и конструкторов должны быть сосредоточены на изы-. екании оптимальной системы поворота сочлененного автомобиля, исключающей или гасящей путем демпфирования возникающие колебания секций. Для определения направлений решения поставленной задачи рассмотрим принципиальную схему системы, обеспечивающей поворот сочлененного автомобиля методом складывания секций. Из рис. 70, а видно, что система включает гидронасос 7 с оборудованием, рулевой механизм 6, связанный механической об-  Рис. 70. Схема системы поворота сочлененного автомобиля ратной связью 5 с двуплечим рычагом 4нс золотниковым устройством 8. Два гидроцилиндра 9 обеспечивают относительный поворот звеньев около центра 0. Важным элементом поворотного устройства является распределительная коробка 1, назначение которой переключать соединение полостей гидроцилиндра 9 с нагнетающим и сливным трубопроводами при переходе поршня через мертвую точку и этим обеспечивать поворот секций на угол складывания до 90°. Золотники распределительной коробки переключаются системой рычагов 2 в зависимости от положения звеньев. На рис. 70, б показано положение звеньев при подходе поршня левого гидроцилиндра к мертвой точке, при которой шарниры О, Ои Ог располагаются на одной прямой. Рычаг 2 перемещает золотник 3, и назначение полостей гидроцилиндра меняется: напорная полость соединяется со сливной, а сливная полость прямого давления становится напорной. Рассмотренная система поворота сочлененного автомобиля по структуре аналогична рулевому управлению с гидроусилителем обычного автомобиля. Разница только в том, что механический привод 5 с системой тяг, рычагов и шарниров предназначен только для обеспечения обратной связи между прицепной сек- цией и распределителем, который сравнивает задающий сигнал от рулевого управления и сигнал о текущем положении звеньев от рычага 4. При рассогласовании этих сигналов золотник смещается в ту или иную сторону, включая в работу гидроцилиндры. Механическая часть системы работу по повороту секций не производит, ее выполняют гидроцилиндры. Известны системы поворота, в которых для обратной связи использован гидравлический или электрический привод. Параметры системы поворота во многом определяют свойства поворотливости, поворачиваемости, управляемости и устойчивости. Так, управляемость и устойчивость зависят от передаточного числа рассмотренной выше системы поворота. Для обеспечения хорошей управляемости рекомендуется, чтобы общее передаточное число ы=атах/6тах=25.. .33, где атах=10 рад/с - максимально возможная скорость вращения рулевого колеса; 6тах=0,3.. .0,4 рад/с -предельная угловая скорость относительного поворота звеньев по условию опрокидывания или бокового заноса (рис. 71). Допустимая предельная угловая скорость складывания зависит как от скорости движения, так и от конечного угла складывания е. Следует подчеркнуть, что приведенные рекомендации разработаны для двухосных сочлененных автомобилей с шинами большого диаметра и большой жесткости. Поэтому для автомобилей других типов эти рекомендации требуют проверки. Кроме того, требуется разработка конструкции и оценка эффективности введения в систему упругой и демпфирующей связей для гашения колебаний, нарушающих курсовую устойчивость ДВИ- Втах ,рад/с жения. Важной характеристикой поворота сочлененного автомобиля является максимальный угол складывания звеньев. Он определяет, с одной стороны, требующийся радиус поворота секций, который по возможности должен быть минимальный; с другой стороны,-расстояние от оси поворота механизма до секций, которые также должны быть минимальными. Выбор этого угла также является оптимизационной задачей.
35 У, км/ч Рис. 71. Зависимость изменения угловой скорости складывания звеньев по условию опрокидывания или заноса при различных углах складывания секций: ;-0=0,04 рад; 2 - 0-0,14 рад; 3 -0--0,27 рад; i - 6=0,4 рад Установим охранное оборудование. Тел. . Звоните! |