
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Конструктивные решения многоосных автомобилей 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 Статистические данные значений углов существующих конструкций автомобилей показывают, что они изменяются в пределах 22.. .90°. Для большинства автомобилей этот угол равен 40.. .45°. Ясно, что выбор оптимального угла складывания звеньев прежде всего зависит от предназначения сочлененного автомобиля, областей и условий его использования. Многоопорные автомобили. Возможность поворота всех опор автомобиля на 90° (см. разд. 6) создает уникальные характеристики поворачиваемости, несмотря на их огромные размеры. Радиус поворота этих автомобилей может изменяться, как и у гусеничных машин, от О до оо, а мгновенный центр поворота может занимать любое положение на горизонтальной плоскости. На рис. 72 изображены некоторые возможные схемы движения многоопорного автомобиля. Направление движения показано стрелками. Для создания того или иного вида движения автомобиля необходим поворот всех опор по строго заданному закону, исключающему абсолютное скольжение опор и обеспечивающему минимальное сопротивление повороту. Для обеспечения поступательного движения в том или ином направлении с □ 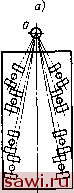 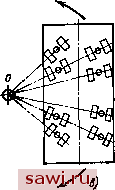 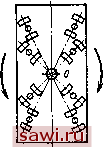 Рнс. 72. Возможные схемы поворота многоопор-вого автомобиля (см. рис. 72, а я б) все опоры должны быть повернуты на один и тот же угол: для схемы а 01 = 02 = .. . = а,=45°; для схемы б 01 = 02 = . . .= Oi = 90°. Для обеспечения криволинейного движения зависимости изменения углов поворота опор сложнее. Для схемы в поворот должен происходить вокруг мгновенного центра поворота, лежащего на поперечной оси вне проекции автомобиля: o,. =arcctg(ctga,.--jj ; a/ (B)=arcctg-ctgo, (,).j ; /? = /,.CtgO;3--& = /,.CtgO; -А. Для схемы г -вокруг мгновенного центра поворота, лежащего на продольной оси: а.н=-а, ; a,=arctg(tgO; + A:j; tga,. Для схемы д - поворот вокруг центра симметрии автомо- биля: а/и=-а/в; о,=arctg (-у tgojj;- /?=0. В этих зависимостях /? -расстояние от центра поворота до центра симметрии автомобиля; Ош и о,в - углы поворота г-й опоры соответственно наружной и внутренней сторон по отношению к центру поворота; 2й -колея автомобиля; h - расстояние от г-й опоры до центра симметрии. При расчетах необходимо соблюдать правило знаков. На многоопорных автомобилях соблюдение закономерностей поворота опор, описываемых сравнительно сложными зависимостями, возложено на специальную систему, включающую ЭВМ (рис. 73). Система имеет обычное рулевое колесо /, которое валом связано с механическим редуктором 10 и датчиком , подающим электрический сигнал в блок обработки данных 4, гидротормозом 6, создающим водителю чувство поворота рулевого колеса . Этот тормоз управляется электронным блоком 5. Программы управления поворотом опор заложены в мини-ЭВМ 3. Ту или иную программу поворота выбирает водитель и включает ее на приборной панели 2, размещенной в кабине. Команды управления опорой по заданной программе передаются через центральный блок обработки данных 4, блок контроля угла поворота опоры 7 на золотниковое клапанное устройство 9, которое управ- 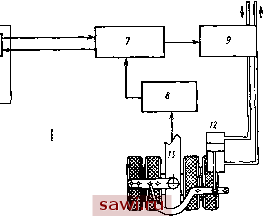 Рис. 73. Схема электронной системы поворота опор миогоопорного автомобиля ляет работой гидроцилиндра 12, воздействующего на механизм поворота опоры 13 на заданный угол. Отсчет угла поворота опоры осуществляется потенциометри-ческим датчиком 8, от которого подаются электрические сигналы в блок контроля 7 и от него на центральный блок 4. Как видно из описания, система управления является замкнутой, саморегулирующейся, работает в полуавтоматическом режиме. Система, изготовленная из современных микроэлектронных блоков и прецизионных гидроэлементоь, работает надежно, позволяет водителю маневрировать автомобилем с огромным грузом в разнообразных стесненных условиях. 36. выводы о ВЛИЯНИИ СХЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ НА ОБЩИЕ КОНСТРУКТИВНЫЕ РЕШЕНИЯ Выбор схемы рулевого управления определяет важнейшие характеристики многоосного автомобиля, связанные с поворачи-ваемостью, поворотливостью, управляемостью и устойчивостью движения, т. е. характеристики, от которых зависит маневренность автомобиля и безопасность движения. В связи с этим выбор схемы рулевого управления является одним из важнейших этапов общих конструктивных решений многоосного автомобиля. После определения числа осей и размещения их по базе должна решаться задача определения числа управляемых осей и места их расположения. При этом должен быть четко определен и обоснован выбор схемы управления: применение только передних управляемых осей, передних и задних управляемых осей, или всех управляемых осей. Теоретические и экспериментальные исследования позволили выявить свойства, преимущества и недостатки возможных схем рулевого управления многоосных автомобилей. Применение задних управляемых осей в сочетании с передними при всех прочих равных параметрах позволяет значительно улучшить показатели поворачиваемости автомобиля в различных условиях и на всех режимах движения. Это важное преимущество может обеспечить длиннобазным многоосным автомобилям хорошую вписываемость в кривые дорожной сети и удовлетворительную маневренность в условиях различной местности, строительных площадках, в том числе и в горных условиях, а для двухосных легковых автомобилей успешно решать все обостряющуюся проблему тесноты транспортного потока больших городов. Наличие задних управляемых осей может предопределять ряд важных эксплуатационно-технических недостатков. Автомобили с таким управлением имеют низкие показатели устойчивости прямолинейного и криволинейного движения по трем основным причинам: неблагоприятное распределение боковых сил при движении по траектории постоянной кривизны. Наибольшая суммарная боковая сила, как правило, приходится на группу колес, расположенных в задней части, что обусловливает склонность автомобиля к заносу; возрастание боковой реакции на колесах задних управляемых осей при выходе из поворота, что может явиться причиной начала заноса автомобиля. Гашение заноса обычно применяемыми методами - резким поворотом колес в сторону заноса - на этих автомобилях недопустимо; такой метод приводит к возрастанию заноса; отсутствие возможности стабилизации задних управляемых колес вследствие изменения направления боковой реакции в процессе поворота и в связи с этим возникновения дестабилизирующего момента на задних осях. Это определяет низкую устойчивость прямолинейного движения, усиливающуюся с появлением свободного хода в приводе управляемых колес. Склонность автомобилей к заносу, наличие дестабилизирующего момента, сложность гашения заноса, смещение траектории задних осей от центра поворота при входе в поворот и другие особенности значительно усложняют управление автомобилем с задними управляемыми колесами. Такое управление требует особого внимания и повышенного напряжения водителя, что ускоряет его утомляемость. В этом случае необходима специальная целенаправленная подготовка водителей. В связи с тем, что недостатки рулевого управления задних управляемых колес определяют безопасность движения, при соз- Дании таких автомобилей должен быть разработан специальный привод поворота управляемых колес. Теоретически и экспериментально показано, что для получения решающих преимуществ автомобилей по поворачиваемости с передними и задними управляемыми колесами и исключения неустойчивости их движения привод управления задними управляемыми колесами должен обеспечивать их пассивную роль в формировании поворачивающего момента на всех режимах движения и поворота. Для этого в приводе рулевого управления должно быть установлено специальное следящее или регулирующее устройство, обеспечивающее определенную закономерность поворота задних колес в зависимости от угла поворота передних и скорости движения автомобиля. При этом надо выполнять следующие условия: не начинать поворота задних колес для уменьшения радиуса поворота до тех пор, пока автомобиль не войдет в поворот и на задних, еще не повернутых колесах, пока не возникнет боковая сила в контакте шины с опорой, направленная в сторону мгновенного центра поворота автомобиля. При дальнейшем совместном повороте передних и задних колес на задних колесах не должен возникать активный поворачивающий момент, их поворот должен быть таким, чтобы лишь уменьшить момент сопротивления повороту по сравнению с моментом при неуправляемых задних колесах. Известны три возможных направления конструирования привода управления колесами автомобиля, частично или полностью удовлетворяющих указанной закономерности работы привода: ручная или автоматическая блокировка привода управления задними колесами в зависимости от скорости движения автомобиля; частичная автоматическая блокировка привода управления задними колесами, обеспечивающая запаздывание начала поворота задних колес относительно передних на 0,1 рад; автоматическое регулирование с помощью микропроцессора поворота задних управляемых колес в зависимости от скорости движения автомобиля и поворота передних колес. Каждое из трех возможных конструктивных решений обладает своими положительными и отрицательными свойствами, для установления которых необходимо проводить сравнительные исследования. Для многоопорных автомобилей, используемых для перевозки негабаритных грузов очень большой массы, целесообразно применение системы управления, позволяющей обеспечивать кроме кругового движения поступательное движение автомобиля в боковом направлении. Система должна быть полуавтоматической и изготовленной на базе современных микроэлектронных схем и гидравлических прецизионных элементов. При определении целесообразной схемы рулевого управления следует учитывать, что недостатки применения задних управляемых осей по мере увеличения числа осей уменьшаются. Наиболее резко эти недостатки проявляются на двух-, трех- и четырехосных автомобилях. На автомобилях с числом осей более шести, имеющих невысокие максимальные скорости движения, применение специального привода управления задних управляемых колес необязательно. Криволинейное движение сочлененных автомобилей описывается системой уравнений, подобных системе уравнений многоосного автомобиля с жесткой рамой. По характеру закономерностей качественного изменения показателей поворачиваемости, поворотливости, управляемости и устойчивости сочлененный автомобиль подобен многоосному автомобилю с передними и задними управляемыми колесами. Ему свойственны те же преимущества и недостатки, которые объясняются физическими явлениями, рассмотренными выше. Проблема повышения устойчивости прямолинейного движения сочлененных автомобилей более сложная и требует иных конструктивных решений. Возможными направлениями могут быть: введение одной, двух осей с управляемыми колесами или введение упругой и демпфирующей связи в гидравлическую систему управления секциями автомобиля. Подбор соотношения масс звеньев и расстояния от оси поворота до центра масс звеньев причины возникновения поперечных колебаний звеньев не устраняет и является способом с ограниченными возможностями. Установим охранное оборудование. Тел. . Звоните! | ||||||||||||||