
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Муфты жесткого соединения 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 звездочка 2. Между вилкой и звездочкой имеется жесткая кинематическая связь и, следовательно, они всегда вращаются совместно. Если ведет обойма /, то, вращаясь но часовой стрелке, она увлекает ролики в узкую часть клина. С момента заклинивания наступает равенство coj = а, с этой угловой скоростью будет вращаться вся система, причем благодаря прорезям заклиненные ролики 3 ведут вилку. Однако,-если момент, приложенный, к вилке, окажется достаточным для преодоления сопротивления роликов расклиниванию, произойдет разъединение обоймы и звездочки. Вращаясь против часовой стрелки со скоростью обойма не ведет. Вилка не может пере- давать вращение обойме при любо.м направлении вращения. Если ведет звездочка, то при движении против часовой стрелки происходит заклинивание роликов и вся система вращается как одно целое со скоростью 0)i. При движении по часовой стрелке звездочка вызовет расклинивание системы. Муфта двойная двустороннего действия риС; VI 3, в) Двойная муфта отличается от одинарной удвоенным числом роликов и рабочих заклиниваюпшх поверхностей. Заклинивание происходит при вращении как звездочки, так и обоймы в любую сторону. Если ведущей является обойма, то полный крутящий момент передается звездочке и ограниченный - вилке в соответствии с сопротивлением последней. Вилка может вести только звездочку, звездочка передает вращение как обойме, так и вилке. Реверсивная муфта (рис, VI, 3, г) Как и муфта одностороннего действия, она соединяет две кинематические цепи. В зависимости от включения она может передавать момент в обоих направлениях; ролики 2 заклинивают муфту в одном направлении, ролики 8 - в обратном. Ролики 2 к 8 расположены попарно на рабочих поверхностях пря.мого и обратного ходов и имеют общую распорную (прижимную) пружину, установленную в отверстии специального выступа на звездочке. Между каждой парой роликов, противоположных той, что расперта пружиной, расположен зуб вилки переключателя 3. Если повернуть и зафиксировать зуб переключателя относительно звездочки так, чтобы он переместил ролик 2 (на правой проекции рис. VI.3, г) по часовой стрелке, то ролик окажется в широкой части клина, т. е. в положении холостого хода. Наоборот, правый ролик 8 при движении звездочки против часовой стрелки, заклинит .муфту и передаст момент того же направления. Схема механизма переключения может быть, например, такой: на валу 5 на скользящей посадке установлена втулка 4, которая может скользить вдоль оси вала, направляемая штифтом 6 (ось паза втулки параллельна оси вала). Втулка 4, в свою очередь, имеет штифт 7, который скользит в косом пазу ступицы переключателя 3 при осевом перемещении втулки 4. Так как паз в ступице расположен под углом к оси вала 5, то осевое движение втулки 4 вызывает поворот на некоторый угол переключателя 3 относительно звездочки /. Управление переключением может осуществляться вручную или автоматически (дистанционно или непосредственно). 2. ГЕОМЕТРИЯ РОЛИКОВЫХ МУФТ Муфта с цилиндрическими роликами и плоским профилем рабочей поверхности звездочки (рис, VI, 4) Положение ролика с центром в Fi - рабочее (заклиненное) положение; положение ролика с центром в F2 - положение его в период свободного хода (расклиненное состояние); S - зазор между роликом и внутренней поверхностью обоймы в расклиненном состоянии, обеспечивающий свободный ход. Имеют место соотношения (VI.1) и (VJ.2), а также следующие: D - d . b~-s- sm a; Ci = (.D-d)-D - d (VI.3) Из уравнений (VI.2) и (VI.3) видно, что с увеличением end угол заклинивания а уменьшается, с7увеличением D - увеличивается. На угол а существенно влияют погрешности изготовления деталей муфты. Если обозначить  Рис. VI.4. Муфта с цилиндрическими роликами и плоским профилем рабочей поверхности звездочки индексами б и м наибольшее и наименьшее предельные отклонения размеров деталей, то формулу VI.2 можно записать так: 2сб Н- de cos Об = 2с + du Между величинами а и S имеется связь: 1 cos (а + р) (VI.4) (VI. 5) а = 0,5 sin (а + Р) - (Z) - d - 2S) sin ф С08ф = (Р - d) cos g Р - d - 2S Предельные, отклонения размеров с и Ci принимают следующие значения (см. нормаль МН 3-61) - табл. VI.1. Предельные отклонения размеров с и d
Если принять, например, для конкретной муфты D = 200, то D = DgoM = = 200; Об = 200 + 0,045 = 200,045; D = 25,0 - 0,014 = 24,986; de = = ном = 25,0; с ,= 74,52 - 0,14 = 74,38; Сб = Сном = 74,52 (для роликов допуск С) и разница между cos а и cos clq [см. формулы (VI.4) и (VI.5) ] составит около 1°. Следует иметь в виду, что кроме погрешностей изготовления на величину угла а оказывают влияние также деформации деталей и их износ. Муфта с цилиндрическими роликами и неплоским профилем рабочей поверхности звездочки Чем больше угол заклинивания а, тем больше, при прочих равных условиях, нагрузочная способность муфты. Отсюда вытекает естественное стремление к выбору возможно большего допустимого угла и к такой конструкции, которая обеспечивала бы стабильность угла заклинивания, несмотря на изменение некоторых размеров вследствие износа. На рис. VI.5 изображена муфта, рабочая часть профиля звездочки которой для обеспечения постоянства угла заклинивания, очерчена по дуге окружности. Центр этой окружности смещен относительно центра обоймы на величину е. Для построения профиля имеются зависимости: 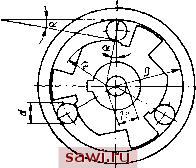 -d = R-2r. (VI.6) Рис VI.5. Муфта, рабочая часть профиля звездочки которой очерчена по дуге окружности e = {D - d) sin = 2 (R - r) sin (VI. 7) При выбранных D, d, a, находим i Ге vl e. С целью увеличения износостойкости наиболее напряженного звена механизма - ролика, диаметр его в конструкции, показанной на рис. VI.5, увеличен по сравнению с подобным механизмом свободного хода по Нормали машиностроения, что вызвало уменьшение величины Did с 8 до 6,5 при неизменных габаритных размерах механизма. Постоянство угла заклинивания позволило за счет большей его величины (а = 10°) снизить контактные напряжения в местах касания роликов и обойм и вместе с тем обеспечило равномерное распределение нагрузки между роликами. Испытания опытных образцов описанной муфты, по свидетельству автора ее конструкции В. Ф. Мальцева [43], показали их высокую долговечность при нагрузках, в семь раз превышающих допускаемые по Нормали машиностроения. Муфта с эксцентриковыми роликами (рису VI. 6) Между двумя цилиндрическими поверхностями наружной и внутренней обойм размещаются эксцентриковые ролики. При условии C0ii>(u2 ролики чаклиниваются. Преимущества такой конструкции по сравнению с муфтой с цилиндрическими роликами: а) простота выполнения обеих обойм; б) возможность разместить большее количество заклинивающих тел; в) относительно больший )адиус контактирующей поверхности г. Радиусы ролика необязательно должны быть одинаковы; наоборот, для снижения контактных напряжений желательно, чтобы Гг ]>/ !, где Гг и г-- радиус поверхности ролика, обращенной соответственно к внутренней и наружной обойме.  Рис. VI.6. Муфта с эксцентриковыми роликами В рассматриваемой муфте главным параметром является угол ф (рис. VI.6). Эксцентриситет находим из выражения е = V{Rx - rY + (Ri +r)-i (Ri - r) (R, + r) cos p. (VI.8) Вследствие малости угла P можно принять cos Р = 1; тогда: е = YrI + +R]+ 4ri?2 - 4rRi - 2RiR = i?2+ 2л - R; sin Ф = OB sin P AB Ri sin p Vr] + rI-2R1R2 cosp Величина cos P может быть найдена из (VI.8) (VI.9) cos P = {Ri-r) + {R,+ r)-e 2 (Ri-r)(R+r) 3. РАСЧЕТ HA КОНТАКТНУЮ ПРОЧНОСТЬ МУФТ С ЦИЛИНДРИЧЕСКИМИ И ЭКСЦЕНТРИКОВЫМИ РОЛИКАМИ Нагрузочная способность муфты определяется наибольшими касательными напряжениями т, возникающими в зоне контакта ролика с обоймой или звездочкой. Полагаем, что модули упругости материалов звездочки, обоймы и ролика одинаковы, т. е. £3 = £о = £р Е. Тогда для муфты с внутренней звездочкой, имеющей плоский профиль рабочей поверхности, касательное напряжение в зоне контакта ее с роликом: 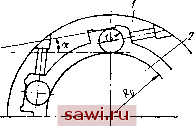 Тгаах-0,142 Rlrz tg 50 [т] Шгг tg а/2 ~ Е (VI. 10) (VI.11) Рис. VI.7. Муфта с наружной звездочкой, имеющей плоский профиль рабочей поверхности Для муфты с наружной звездочкой, имеющей плоский профиль рабочей поверхности (рис. VI.7) напряжение в зоне контакта ролика со звездочкой 1 Тз= 0,142 ЩлсчЕ llrz tg а/2 Напряжение в зоне контакта ролика с обоймой 2 То = 0,142 . f Мр,счЕ (Ro + г) Rtlrz tg а/2 (VI. 12) (VI.13) В формуле (VI. 13) - приведенный радиус кривизны. Напряжения Т3 Ro-i г и То неодинаковы: Тз<То. Однако для муфт с частым включением решающее значение по признаку износа все же может иметь Тд [формула (VI. 12) ]. В формулах (VI. 12) и (VI.13) ;?о -радиус внутренней обоймы (рис. VI.7). Из (VI.12) и (VI.13) получаем мак-.симально допустимый момент: /HWoltga. (VI.U) Таблица VI.2 Допускаемые напряжения Лтах = 50 [т] .Rg/rz tg а/2 (УД £ {Ro+r) Для муфты с эксцентриковыми роликами (рис. VI.6): т = 0,142 МрасчЁ iR2 + Г) RpZ tg ф Мтах = 50 [rf rI Ir tg ф в (R + г) (VI. 16) (VI.17)
Величина допускаемого напряжения [т ] зависит нагружения и может быть выбрана из табл. VI.2. В формулах (VI. 10)-(VI. 17) расчетный мо.мент Мрасч = Л1ном (д + р) ki> от числа циклов где М ом - номинальный момент привода; йд - коэффициент динамичности, зависящей от типа двигателя; кр - коэффициент динамичности, зависящий от типа рабочей машины; /е - коэффициент точности, учитывающий погрешности изготовления деталей муфты, ведущие к неравномерному распределению нагрузки на ролики. Значения коэффициентов приведены в табл. VI.3. Т а б л№ ц а VI.3 Значения коэффициентов д, кр, к
4. РЕКОМЕНДАЦИИ ПО ВЫБОРУ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ МУФТ И МАТЕРИАЛОВ ИХ ДЕТАЛЕЙ Нормальная, т. е. безотказная работа муфты свободного хода состоит из этапов: свободный ход-самозаклинивание-заклиненное состояние-саморасклинивание-свободный ход. Правильный выбор параметров муфты, среди которых главным является угол заклинивания, и должен обеспечить безотказность выполнения указанных процессов. Для муфт с цилиндрическими роликами условие надежности самозаклинивания имеет вид а<2р, (VI.18) где р - угол трения скольжения. Условие саморасклинивания имеет вид а 2°. (VI. 19) Условие самозаклинивания муфты с эксцентриковыми роликами Ф<р. (VI.20) Установим охранное оборудование. Тел. . Звоните! |