
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Выбор типа подшипника 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 несущую силу отнести к основному относительному зазору ilp, то можно написать Следовательно, const. (196) (197) Для определения силы трения можно выражение T=fP представить в виде Здесь -у- определяется по табл. 26, (198) Фр - по выражению (197),-по (194). Равнодействующая гидродинамических сил для всего подшипника определится как геометрическая сумма несущих сил всех сегментов. При установившемся режиме она должна равняться внешней нагрузке Р. Положение центра цапфы должно быть таково, чтобы условие равновесия удовлетворялось, т. е чтобы силовой многоугольник был замкнут. Для отыскания такого положения использован графический метод. На фиг. 41 показан принцип построения графика для подшипника, схема которого изображена вверху: угол охвата нижнего сегмента 180°, двух верхних - по 90° без учета канавок; скосы (клиновые выемки) занимают точно 2/з дуги каждого сегмента; плоскость стыка нижнего сегмента с верхними (расположена под углом 35° к горизонту. Внешняя нагрузка Р направлена вертикально вниз. Точками уи Жц Мщ отмечены центры эквивалентных круговых дуг; из этих центров проведены лучи, соответствующие значениям ф от 0-90°, и дуги окружностей, соответствующие различным значениям Окружность, описанная из центра О радиусом 1=1, представляет собой границу возможных отклонений центра Z цапфы. Внутри этого круга надо отметить все точки Zi, для которых Ррз будет направлена вертикально вверх, 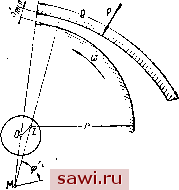 Фиг. 40, Определение несущей силы смазочного слоя эквивалентного цилиндрического сегмента. т. е. против внешней нагрузки Р. Геометрическое место всех точек Z даст кривую положения центра цапфы при вертикальной нагрузке. На фиг. 42 показано графическое определение Ррез для произвольного положения цапфы - равнодействующая Ррз в общем случае не направлена по вертикали. Вместо построений, показанных на фиг. 41, удобнее выполнять графики для безразмерных величин Фр, как это показано на фиг. 43. Кривая подвижного равновесия строится в интервале Фр от О до со методом последовательных приближений. Например, выбрав произвольную величину очерчивают из центра дугу соответствующего радиуса xl- Для нескольких точек этой дуги определяют значения Фр каждого сегмента, поль- 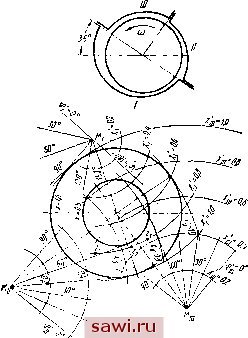  Фиг. 41. Построение графика для определения положения центра цапфы в трех-клиновом подшипнике. Фиг. 42. Определение результирующей силы Р рвз смазочных клиньев подшипника ВВС. зуясь таблицами для цилиндрических подшипников с эквивалентными параметрами. Точка, в которой направление (Фр)рез будет вертикальным, принадлежит искомой кривой равновесия. Так поступают для ряда значений Хг - на каждой дуге радиуса Х/ отыщется особая точка с вертикальной результирующей безразмерной нагрузкой {Фр)рез- Геометрическое место этих точек представит собой кривую равновесия цапфы в трехклиновом подшипнике. Пример построения многоугольников векторов Фр1 показан на фиг. 44. На основании фиг. 43 и 44 может быть решена и обратная задача, т. е. найдены 150 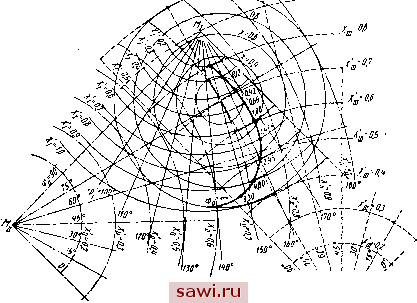 Фиг. 43. Перемещение центра цапфы в трехклиновом подшипнике ВВС при вертикальной нагрузке.  ГгО XfOfi XrO,i x;<S xrO,7 xrO,i Фиг. 44. Графическое определение (Ф,) для подшипника ВВС при вертикальной нагрузке. Установим охранное оборудование. Тел. . Звоните! |