
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. 8(901)543-6693 ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. 8(901)543-6693. Звоните! Главная Автомобильные электронные системы 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 сам нс захочет этого сделать. Если на дисплей выведою расстояние, которое может пройти автомобиль с имеющимся запасом топлива, незачем показывать количество топлива в баке и т. д. Компьютер может при необходимости прервать нормальный процесс вывода информации и сгенерировать на дисплей предупреждающее сообщение типа: топлива осталось только на 50 км пробега или унаю давление в левой задней шине . Применение программ синтезаторов речи позволяет делать такие сообщения голосом, приче.м водитель при конфигурации системы .может уста1ювить желаемые параметры голоса: мужской или женский, высокий или низкий и т. д. Для привлечения внимания водителя используются и более простые звуковые сигнаты. Голографическое изображение является трехмерным представлением реального объекта, при этом используются лазер1Нз1е из;учате;ш - проекторы и подходящий экран. В настоящее время проводятся исследования и разработка аппаратуры с целью повысить безопасность езды в темное время суток. Оди)1 из вариантов таков: информация сни.мается с инфракрасных видеока.мер, обрабатывается, голографическое изображение проецируется на лобовое стеюю перед водителе.м. За счет использования этого своеобразного прибора ночного видения управление автомобилем в темное время суток упрощается. Но, как оказалось, электроника в автомобиле не только помогает, по и мешает. Исследования, проведенные в группе водителей возрастной категории старше 60 лет, показали, чло пользование электронной картой сильно отвлекает водителя от дороги. Реакция пожилого водителя, который во время движения вынужден отвлекаться на гелематику, снижается иа 30... 100 процентов по сравнению с его 18-30-летними коллегами. 5.6. Навигационные системы автомобиля Первые навигационные сисгемы применялись юлько для индикации расчетного времени прибьггия в пункт назначения и расстояния до него и использовали датчики азимута и скорости вращения колес. Позднее начали использоваться базы данных с картографической ипформапией, появилась возможносль определять ле-кущис координаты автомобиля на карте .местности, для чего извест1н>1 несколько .методов. Механические прототипы навигационных систем появились в США в 1910 юду, когда автомобили начали производиться в больпшх количествах, а дороги еще не были размечены. Например, в навигационной системе Chadwick Road Guide .металлический диск с отверстиями вращался синхронно с пройденным путем. Отверстия от.мечали перекресгки на маршруле. К дорожкам на диске пружинами прижимались специсшьные мололочки. При попадании молоточка в отверстие услройство издавало звонок, и специальный рычажок с кодированным символом указывал вoдитeJпo, какое необходимо выполнить действие. Точность и надежность лаких павщациопных сислем были низкими, их перестали использовать после стан;1артизации дорожных знаков в 20-х годах и введе-1п4я разметки дорог. В 60-х годах автомобильные компании вновь начали проявлять ингерес к навигационным систе.мам. В 1987 году Toyota начала их усланавливать на серийные модели как опцию. В 1994 году в США, Европе, Японии уже было продано более 500000 автомобильных навигационных систем.  Спутник GPS Датчик азимута Датчик скорости колес Приемник GPS CD-ROM Абсолютные координаты as ? 8
Текущие координаты автомобиля -► Дорожная информация Рис. 5.14. Структура навигационной системы 5.6.1. Функции, структура и составные компоненты навигационной системы Па рис. 5.14 показана структура навигационной системы. Система может осуществлять навигационное счисление, определять положение автомобиля на карте местности по конфигурации пройденного пути, определять абсолютные координаты с помощью спутниковой системы GPS (глобатьная позиционирующая система или GPS - Global Positioning System). С помощью навигационного счисления определяют относительное положение автомобиля и направление движения по информации, полученной с датчиков скорости вращения колес и азимута. Конфигурация участка пройденного пути, полученная с помощью навигационного счисления, сравнивается с конфигурацией дорог, нанесенных на карту. Определив дорогу, по которой движется автомобиль, система находит и его текущие координаты. Более точное определение координат автомобиля на карте производится с помощью GPS по широте и долготе. Считается, что для практических целей достаточно знать координаты автомобиля с точностью до размера половины квартала, т. е. ±100 метров. Автомобильная навигационная система должна иметь в своем составе датчики пройденного пути и направления движения. Датчик пройдетюго пути - это та или иная конструкция электронного одометра, информация в который поступает с датчиков скорости вращения колес ABS. Одо.метрам присущ ряд систематических погрешностей, которые необходимо корректировать. К ним относятся: 1. Разница в диаметрах новой и изношенной покрышки дает погрешность в определении пройденной дистанции до 3%. 2. За счет увеличения диаметра покрышки от центробежной силы на каждые 40 км/час скорости автомобиля погреппюсть в определении пройденной дистанции увеличивается на 0,1...0,7%. 3. Изменение давления в шинах на 689 кПа (10 psi) увеличивает погрешность на 0,25...1,1%. Для определения направления движения автомобиля обычно используются датчик азимута, датчики скорости вращения колес, гироскопы. 5.6.2. Датчик азимута (компас) Датчик азимута использует .магнитное поле Земли и представляет собой кольцевой сердечник из ферро.магпегика, )ia который на.мотапы обмотка возбуждения и перпендикулярно друг дру1у две выходные обмотки (рис. 5.15). К обмотке возбуждения приложено синусоидальное напряжение. При отсутствии внешнего магнитного поля в выходных обмотках наводится ЭДС взаи.моиндукции, также синусоидшшная, с нулевым средни.м значением. При наличии постоянного внешнего .магнитного поля напряженностью (магнитное поле Земли) происходит искажение синусоида,1Ьпой формы магнитного потока в сердечнике за счет наложения постоятпюй составляющей и напряжений выходных обмолок (рис. 5.16). Обмотка возбуждения  Координата X Координата Y Рис. 5.15. Геомагнитный датчик азимута Магнитное насыщение 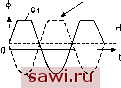 Магнитный поток  Выходное напряжение Рис. 5.16. Электромагнитные процессы в геомагнитном датчике азимута в присутствии внешнего магнитного поля Н Если внешнее магнитное поле направлено под углом 9 к обмотке X, то средние значения напряжений в выходных обмотках определятся так: К = kHcosQ, = кШтО, где к - коэффициент пропорциональности. Олсюда 9 = arctg(Ky/KJ, т. е. направление движения автомобиля определено. Современные датчики азимута выпускаются в интегральном исполнении. 5.6.3. Датчик скорости вращения колес Используются датчики скорости врап1ения передних колес, применяе.мые и для ABS. Угол поворота автомобиля определяется по разности путей, проходимых при поворол-е левы.м и правы.м колесом. Когда автомобиль поворачивается на угол О радиан с радиусом поворота R, пути, пройденные левым и правым колесами, описывают дуги с общи.м цешром (рис. 5.17). Пули, пройденные левым и правы.м Установим охранное оборудование. Тел. 8(901)543-6693. Звоните! |