
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. 8(901)543-6693 ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. 8(901)543-6693. Звоните! Главная Автомобильные электронные системы 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 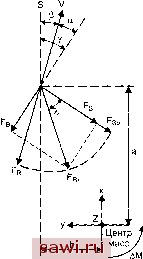 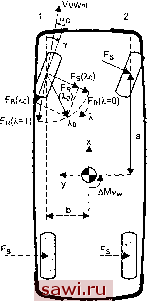 а) б) Рис. 8.2. Силы, действующие на колеса автомобиля во время поворота V - вектор скорости движения автомобиля; S - продольная ось автомобиля; у - угол поворота колеса относительно оси S; а - угол бокового увода колеса от фактического направления движения (от вектора У); \\ = (у - а) - угол бокового увода автомобиля ( угол рыскания ); Fg - боковая сила действующая на ось колеса; Fg - тормозная сила колеса при его скольжении по дороге; Рд - результирующая сила бокового увода колеса, равная векторной сумме тормозной (F) и боковой (Fs) сил. (Fpi = Fs +. FsJ. - угол между осью колеса и направлением его скольжения Управляя тяговыми силами F[, ведущих колес (Рз + F,)4) и тормозными силами F всех четырех колес (Fg F,, Рвз, Р,), возможно добиться такого состояния движения автомобиля на поворотах или на скользкой дороге, при котором М5: Мк. Мк - критическое значение суммарного момента М, при котором углы бокового увода центров переднего и за-чнего мостов появляются не под воздействием бокового юза, а в результате эластичного прогиба шин всех четырех колес. В таком случае колеса не срываются в юз и автомобиль остается управляемым. (Согласно ОСТ 37.001.05186, унраазяемость автомобиля - это его способность точно следовать повороту передних колес [22].) Функции автоматического управления под-тормаживанием и тяговой силой колес при повороте автомобиля на большой скорости или при движении по скользкой дороге вьнюлняет система управления курсовой устойчивостью (система VDC). 8.3. Функциональная блок-схема системы VDC Ранее, на рис. 1.1, была показана система VDC как составная часть системы дорога - водитель - автомобиль . Функциональная блок-схема системы VDC, отвечающая решению фундаментазыюй задачи управления курсовой устойчиво- Измеренные величины: VJ л MmoI. MpR. Pcire Измеренные и оценочные значения Автомобиль Исполнительные механизмы: гидравлика тормозов управление двигателя Наблюдатель P,a,Vv,Fs,FN,FRl Vx.Fb Pcicr, Mdr Номинальные значения . Pno,V(N~ Vx.ax FR,a Контроллер переменной состояния AMyvnT Вычисление номинального скольжения и момента блокировки Fs, Fn, Vy, Mqr Тормоз и контроллер приводного скольжения А>1, )iMXo,MNoLock,Di X,Vx, ах, Fb, Fbf MnoMoi, MnoSPR, TiOFF, UMval Исполнительный механизм и оценочные значения MNoMol.UMval, MnoSPR, TiOFF, Рис. 8.3. Функциональная блок-схема системы VDC стью автомобиля, показана на рис. 8.3. Такая схе.ма описывает фyнкциoнaJьнyю взаимосвязь параметров системы VDC и порядок их обработки. Во-первых, по входным параметрам (воздействиям водителя на органы управления), которые с помощью датчика угла поворота рулево10 колеса, датчика дроссельной заслонки и датчика давления в тормозной системе преобразуются в электрические сигналы, определяется но.минальное (штатное) поведение автомобиля, описанное номинальными значениями регулируемых переменных. Это наиболее важная и наиболее сложная задача для контроллера системы VDC, так как поведение автомобиля зависит не только от воздействий водителя, но и от неизвестных воздействий окружающей среды, например, от трения .между колесами и дорогой, от температуры воздуха и т. д. Кроме того, значения регулируемых переменных должны быть выбра)1Ы такими, чтобы поведение автомобиля в критических ситуациях было подобным движению в нормальных условиях. Во-вторых, по полученны.м значения.м от датчиков скорости колес, датчика рыскания и датчика боковых ускорений определяется фактическое поведение автомобиля, соответствуюпгее фактическим значениям регулируемых пере.мощых. Далее вычисляется и используется разность между номинальными и фактическими значениями переменных величин как набор управляюпщх сигналов в контроллере системы VDC. Для реализации задачи управления боковым уводом каждого колеса в отдельности, т. е. при выполнении основ1ЮЙ функции системы VDC, необходимо, чтобы тормозное давление на каждо.м колесе могло модулироваться независи.мо от водителя и как этого требует заложенная в память ЭБУ-VDC программа упрашю-ния. Отсюда очевидно важное различие между системами ABC и VDC. Для системы ABC колесо является объекто.м управления скоростью его вращения, чтобы предотвратить блокировку и сохранить скольжение колеса малым (в пределах допустимой нормы). При этом предотвращается возможность появления и некоторого воздействия поперечной силы. Для системы VDC автомобиль является объектом управления с целью стабилизации движения в критических ситуациях, когда пробуксовкой колес можно и нужно управлять, чтобы получить требуемые поперечные и продольные силы воздействия на движущийся автомобиль. Наблюдатель Оценка значений фазовых переменных Контроллер динамики автомобиля Управление скоростью рыскания и углом бокового увода автомобиля Сигналы датчиков для VDC 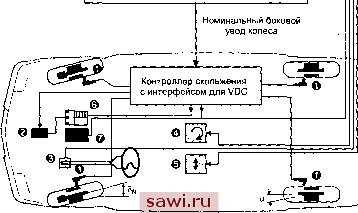 О Датчик скорости колеса @ Датчик давления в тормозной системе @ Датчик угла поворота руля О Датчик скорости рыскания @ Датчик бокового ускорения © Модуляция давления в тормозной системе О Система управления двигателем Рис. 8.4. Каскадная структура системы VDC с двумя контурами обратной связи Во внешнем контуре управления с обратной связью происходит коррекция HOMHHajibHbix значений скольже1Шя колес под требуемое для нештатных условий движения. При этом контроллер скольжения получает сигналы управления от контроллера динамики автомобиля в виде разностных величин между номи-на.,1ьны.ми и фактическими параметрами движения, а также от датчиков авто.мобиля. Во внутретшем контуре формируются сипишы управления для исполнительных механизмов, с помоиц>ю которых корректируется боковой увод колес до номинальных значений скольжения. Наблюдатель используется для того, чтобы оценить фактическое значение угла бокового увода автомобиля и других неиз-мсряемых величин, например, сил воздействия на колеса, направленных по В критической ситуации, когда автомобиль начинает срываться в движение боковым юзом, ширина полосы скольжения межту передними и задними колесами больше ширины автомобиля. Это позволяет выбрать каскадную структуру системы управления, в которой внутренний контур управления с обратггай связью управляет пробуксовкой колес, а внешний - движением автомобиля. Такая структура системы управления показана на рис. 8.4. Установим охранное оборудование. Тел. 8(901)543-6693. Звоните! |