
Установка Видеонаблюдения, Охранной и Пожарной сигнализации.
Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет.
|
| Тел. ОАО «Охрана Прогресс» Установка Видеонаблюдения, Охранной и Пожарной сигнализации. Звоните! Приедем быстро! Установим качественно! + гарантия 5 лет. |
|
|
Установка технических средств охраны. Тел. . Звоните! Главная Механические и импульсные передачи 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 Если показатель степени b близок к единице, что имеет место при жестких обоймах и относительно больших углах заклинивания, то зависимость М = М можно принять линейной, т. е. М = ftg. (114) Тогда уравнение относительного движения обойм примет вид (115) 2? Л1 - УИ Период заклинивания у механизмов свободного хода импульсных вариаторов протекает при возрастании угловой скорости 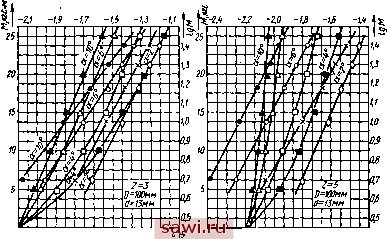 US Л5тЛЛ{Л5Л5. i,pad о IS 45 fib т215т о,от Iuwi#zisiaa3fl6ft05 от тьтгтз i,pad Рис. 12 ведущей обоймы (о. Угловая скорость ведомой обоймы а в начальный момент заклинивания равна нулю (для вариаторов с одним или двумя механизмами свободного хода) (см. рис. 11 б,) либо имеет некоторую положительную величину (для вариаторов с тремя и больше механизмами свободного хода) (см. рис. И, б).. В первом случае, когда заклинивание начинается при неподвижной ведомой обойме, в начале процесса заклинивания момент Ml больше момента М (5), действующего со стороны ведущей обоймы, эта фаза с периодом 1з (см. рис. 11, б) протекает при неподвижной ведомой обойме. Во второй фазе с периодом й на участке аЬ происходит ускоренное движение ведомой обоймы. Рассмотрим возможные случаи заклинивания МСХ импульсных вариаторов и соответственно решения уравнения относительного движения обойм. Заклинивание при Ml = Ml {t). Считая, что колеблющаяся обойма импульсного вариатора приводится в движение посредством преобразующего механизма, имеющего постоянную угловую скорость кривошипа ю, можно кривую изменения углового ускорения этой обоймы == {I) в период заклинивания (участок аЬ) аппроксимировать: si = 81 cos тсок (46) где т - постоянный коэффициент. В каждом конкретном случае применения импульсных вариа-торовв приводе рабочих машин можно определить закон изменения моменту сил сопротивления: Однако малая продолжительность периода заклинивания дает основание принять MlMlokt, (117) где Мсо - момент сил сопротивления в начальный момент заклинивания; k --постоянный коэффициент. Используя последние два уравнения, а также уравнения (105) и (113), получаем = 81 cos rmj -f + с. (118) Данное нелинейное дифференциальное уравнение с постоянными коэффициентами можно решить приближенно численными методами посредством ЦЭВМ или нижеизложенным графическим методом в плоскости i,Ot. Пользуясь начальными условиями I (0) = О и Г(0) = О, из уравнения (118) определяем Далее найдем радиус кривизны интегральной кривой в началь-ной точке: Так как в начальный мвмент (0) = О, то этим радиусом с центром в точке 0 проводим дугу Оа окружности (рис. 13) до йе{5есечения с правой вертикалью Первого элеМейтарно?о участка Ati- , Определив величины (Ai) и i(Ai), находим радиус кривизны из выражения Pi- ГЩ) й проводим этим радиусом из центра 0, лежащего на направлении линии Оа, отрезок аЬ круга кривизны до вертикали следующего участка А/j. Аналогичным способом выполняем построение на других участках интервала t. С целью увеличения точности можно применить метод добавочного полушага. Учитывая то обстоятельство, что в конечный момент заклинивания относительная угловая скорость обойм равна нулю, из построенного графика (рис. 13) определяем время заклинивания 4 и наибольший угол относительного поворота обойм иах- По величине угла ах на основании уравнения (111) найдем максимальный момент, действующий на механизм: 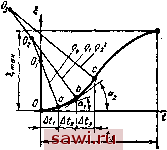 Рис. 13 (120) По величине этого момента следует производить расчет на контактную прочность и жесткость механизмов свободного хода. При линейной характеристике жесткости механизма уравнение относительного движения обойм в период заклинивания на основании уравнения (118) будет представлять линейное неоднородное дифференциальное уравнение с постоянными коэффициентами . I + ail = 8ix:os m(x)t -{-qt-\-c, где (121) Решение данного уравнения имеет вид I =-Ч-2-cosmoaj + -t--X xl/l+ctg4oCos(/5- cfo)-\-~y (122) af/2 Заклинивание при постоянных моментах сил Движущих и сил сопротивления. Уравнение (113) в этом случае будет, иметь вид ©ico = (аз - ЛЯ*) dl. где 2 = -г--\--r- интегрируя выражение (123), получим = l,4l/ .5 5- (124) Так как в конечный момент заклинивания (о - О, g - Ux. то из последнего выражения найдем >шах аг (6+1) AJ (125) Используя формулу (111), получим величину максимального момента Мшях = -1- (126) Время периода заклинивания можно определить из уравйения (124): dl - (127) После преобразований и подстановки Smax соотношение (127) можно записать в виде ± 1 Uax dx (128) 201 или через гамма-функции Согласно формуле Лежандра запишем Ш(+4)-(4). Используя это выражение и зная, что Г (±.) = я, искомый , интеграл можно представил-ь в форме пачспис Sn,ax ИЗ (15) В следующем виде: 3 - ~3£Г2-fiirr 2 2* 2* г (129) прим?т\иГ Р-Ристике жесткости уравнение (111) (Odco = ( 3 rf или после интегрирования Так как при со = 0; I = (130) вшах бшах 202 202 м - м - + -7 2 I Подставляя Imax В уравнение (114), найдем максимальную Величину момента: Jmax- J \ 4- Из выражения (130) определим VkJ \ 2 arcsin (131) 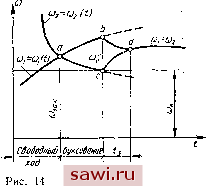 Ударное заклинивание. При некоторых режимах работы процесс заклинивания протекает при ударном воздействии сил на ролики и обоймы МСХ. Кроме того, ударное заклинивание МСХ возможно у вариаторов, установленных в приводах машин с ударным приложением нагрузки на рабочем органе (прерывистое точение на токарных станках, пульсирующие конвейеры, машины горной промышленности и т. д.). Ударное заклинивание возможно и при плавно изменяющихся нагрузках, если прижимные усилия не обеспечивают контакт в начальный момент заклинивания, когда угловые скорости обойм выравниваются, а контакт ролика с обоймами наступает при относительной :корости обойм, направленной в сторону заклинивания механизма. Нарушение контакта роликов с одной из обойм может произойти: из-за наличия слоя смазки, разделяющего контактные поверхности, что возможно при высокой вязкости смазывающей жидкости, а также расклинивающем воздействии смазывающего слоя при вращении цилиндрических роликов или перемещении эксцентриковых роликов с кольцевой прижимной пружиной относительно одной из обойм (чаще всего относительно внутренней обоймы); в результате динамических усилий, действующих на ролик и стремящихся оторвать его от одной из обойм. Чтобы представить удар1ое заклинивание при отсутствии контакта роликов с одной,из обойм, обратимся к рис. 14. Если Установим охранное оборудование. Тел. . Звоните! |